プラント推定のための測定された応答のインポート
以下の例では、PID 調整器を使用してプラント推定のために測定された応答データをインポートする方法を説明します。
System Identification Toolbox™ ソフトウェアがある場合は、PID 調整器を使用し、時間領域の応答データに基づいて線形プラント モデルのパラメーターを推定できます。次に、PID 調整器により結果の推定モデルの PID コントローラーが調整されます。応答データとして、実際のシステムから測定して得られたデータか、Simulink® モデルのシミュレーションを行って得られたデータが使用できます。プラントの推定は、特に Simulink モデルが線形化されない場合やゼロに線形化する場合に有用です。プラントの同定では、Simulink モデルの終了時間に有限値を指定しなければなりません。
測定された応答データの読み込み
この例で測定された応答データを MATLAB® ワークスペースに読み込みます。
load PIDPlantMeasuredIODataPID 調整器に応答データをインポートすると、測定データは、負のフィードバック ループによって PID コントローラーに接続されているプラントを表現していると想定されます。つまり、PID 調整器はシステムについて以下の構造を仮定します。ここに示すように、PID 調整器は、ステップ信号がプラント入力 u で加えられ、システム応答が y で測定されたものと仮定します。

この例のサンプル データ ファイルには 3 つの変数が含まれ、それぞれが 501 行 1 列の配列です。inputu は、応答データを取得するために u で加えられた単位ステップ関数です。outputy は、y で測定されたシステムの応答です。時間ベクトル t は、0 秒~ 50 秒までサンプル時間 0.1 秒で実行されます。inputu を t と比較することにより、ステップが t = 5 秒で発生することがわかります。
この例にあるような数値配列、timeseries オブジェクトまたは iddata オブジェクトとして保存された応答データをインポートできます。
応答データのインポート
PID 調整器を開きます。
pidTuner(tf(1),'PI');PID 調整器で、[PID 調整器] タブの [Plant] メニューから
[新規プラントの同定]を選択します。
[プラントの同定] タブで、
 [I/O データの取得] をクリックします。使用する測定された応答データのタイプを選択します。たとえば、ステップ入力に対するプラントの応答を測定した場合は、[ステップ応答] を選択します。任意のスティミュラスに対するシステムの応答をインポートする場合は、[任意の I/O データ] を選択します。
[I/O データの取得] をクリックします。使用する測定された応答データのタイプを選択します。たとえば、ステップ入力に対するプラントの応答を測定した場合は、[ステップ応答] を選択します。任意のスティミュラスに対するシステムの応答をインポートする場合は、[任意の I/O データ] を選択します。[ステップ応答のインポート] ダイアログ ボックスで、応答データに関する情報を入力します。たとえば、変数
outputyに格納され、0.1 秒ごとにサンプリングされるステップ応答データの場合は次のようになります。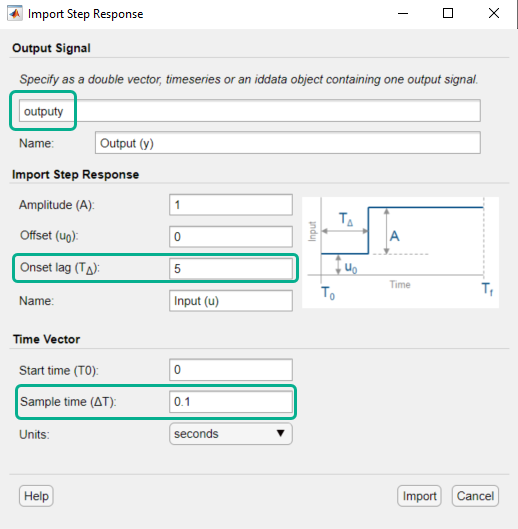
 [インポート] をクリックします。[プラントの同定] タブが開き、応答データと初期の推定プラントの応答が表示されます。
[インポート] をクリックします。[プラントの同定] タブが開き、応答データと初期の推定プラントの応答が表示されます。
データの前処理
応答データの品質と特徴によっては、プラントの推定結果を改善するためにデータに前処理を実行するとよい場合があります。[前処理] メニューに、応答データを前処理するいくつかのオプションが用意されています。たとえば、オフセットの削除、フィルター処理、データのサブセットの抽出などがあります。特に、応答データにオフセットが存在する場合は、同定結果を良くするためにオフセットを削除することが重要です。
[プラントの同定] タブで、 [前処理] をクリックし、使用する前処理オプションを選択します。タブが開き、前処理を行う前後のデータの図が表示されます。タブ内のオプションを使用して、前処理のパラメーターを指定します。
[前処理] をクリックし、使用する前処理オプションを選択します。タブが開き、前処理を行う前後のデータの図が表示されます。タブ内のオプションを使用して、前処理のパラメーターを指定します。

(前処理オプションの詳細については、データの前処理を参照してください)。
前処理をした信号が満足できるものになったら、 [更新] をクリックして信号の変更を保存します。
[更新] をクリックして信号の変更を保存します。 をクリックして [プラントの同定] タブに戻ります。
をクリックして [プラントの同定] タブに戻ります。
PID 調整器は自動的にプラント パラメーターを調整して、前処理された応答信号に基づいてプラントの新しい初期推定を作成します。
この段階で、推定プラントの構造とパラメーターを調整して、PID 調整に使用する推定線形プラント モデルを得ることができます。詳細については、測定またはシミュレーションで得られた応答データから対話的にプラントを推定を参照してください。