異なる操作点での調整
既定の設定では、PID 調整器はプラントを線形化して、Simulink® モデルの初期条件で指定された操作点でコントローラーを設計します。この操作点が、コントローラーを設計する対象の操作点と異なる場合もあります。たとえば、定常状態でシステムのコントローラーを設計する場合などです。ただし、一般に Simulink モデルは、初期条件では定常状態にありません。この場合、PID 調整器がプラントを線形化してコントローラーを設計するために使用する操作点を変更します。
PID 調整器の新しい操作点を設定するには、次のいずれかの方法を使用します。選択する方法は、望ましい操作点に関してわかっている情報により異なります。
既知の状態値を使用してモデルで操作条件を手動で指定する。
特定のシミュレーション時間でモデルを再線形化する。
以前に計算した操作点または線形モデルをインポートする。
更新された操作点に基づいて PID 調整器で新しい初期コントローラー設計が生成された後、そのコントローラー設計を解析できます。詳細については、PID 調整器での設計の解析を参照してください。
モデルでの操作条件の手動指定
望ましい定常状態の操作条件となるモデルの状態がわかっている場合は、それらをモデルで直接指定できます。
PID 調整器を閉じます。
モデルのコンポーネントの初期条件を目的の操作条件を示す値に設定します。
PID Controller のダイアログ ボックスで [調整] をクリックして PID 調整器を開きます。PID 調整器は、新しい既定の操作点を使用してプラントを線形化し、新しい線形プラント モデルの新しい初期コントローラーを設計します。
シミュレーションのスナップショット時間でのモデルの再線形化
有限時間内にモデルが望ましい状態に達する場合は、モデルを特定のシミュレーション時間で再線形化できます。
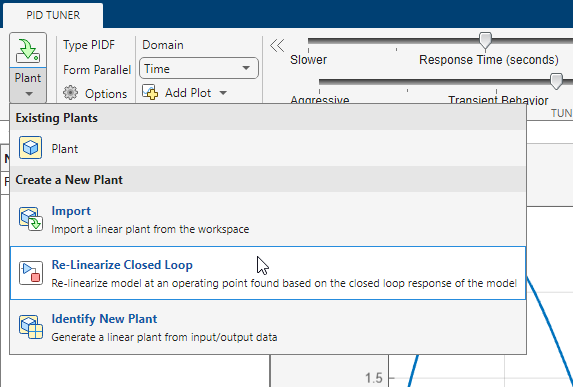
[PID 調整器] タブの [プラント] メニューで [閉ループの再線形化] を選択します。
[閉ループの再線形化] タブで、
 [シミュレーションを実行] をクリックして [シミュレーション時間] テキスト ボックスで指定された時間でモデルのシミュレーションを行います。
[シミュレーションを実行] をクリックして [シミュレーション時間] テキスト ボックスで指定された時間でモデルのシミュレーションを行います。PID 調整器によって、誤差信号が時間の関数としてプロットされます。このプロットを使用し、モデルが定常状態になる時間を特定することができます。モデルを線形化するスナップショット時間まで垂直バーをスライドさせます。
 [線形化] をクリックして、選択したスナップショット時間でモデルを線形化します。PID 調整器によって新しい線形化プラントが算出され、PID 調整器のワークスペースに保存されます。PID 調整器によって自動的にその新規プラントに対するコントローラーが設計され、新しい閉ループ システムの応答プロットが表示されます。PID 調整器は [PID 調整器] タブに戻ります。このタブの [Plant] メニューには現在のコントローラーの設計に新しいプラントが選択されていることが反映されています。
[線形化] をクリックして、選択したスナップショット時間でモデルを線形化します。PID 調整器によって新しい線形化プラントが算出され、PID 調整器のワークスペースに保存されます。PID 調整器によって自動的にその新規プラントに対するコントローラーが設計され、新しい閉ループ システムの応答プロットが表示されます。PID 調整器は [PID 調整器] タブに戻ります。このタブの [Plant] メニューには現在のコントローラーの設計に新しいプラントが選択されていることが反映されています。メモ
Trigger-Based Operating Point Snapshot ブロックをもつモデルの場合、シミュレーションがスナップショット時間に到達する前にトリガーするイベントで操作点が取得されます。
操作点または線形モデルのインポート
定常状態マネージャー、モデル線形化器、または findop を使用して以前に操作点を計算している場合は、その操作点を MATLAB® ワークスペースから PID 調整器にインポートできます。あるいは、以前に計算した線形モデルをインポートできます。
[PID 調整器] タブの [プラント] メニューで [インポート] を選択します。

[プラント モデルの取得] ダイアログ ボックスで、[LTI システムのインポートまたは MATLAB ワークスペースで定義された操作点での線形化] を選択します。
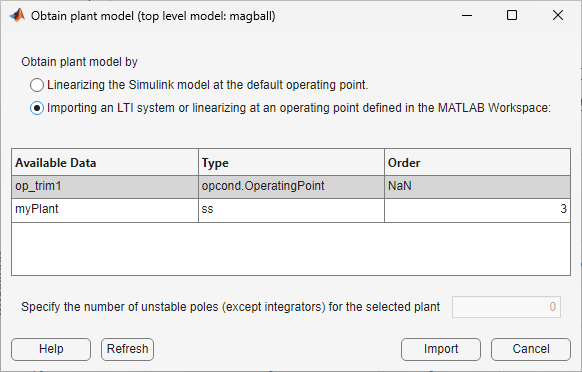
MATLAB ワークスペース内の使用可能な操作点と LTI モデルがテーブルにリストされます。
目的の操作点または LTI モデルをテーブルから選択します。
ヒント
MATLAB ワークスペース内の操作点と LTI モデルのリストを更新するには、[リフレッシュ] をクリックします。
frdモデルや内部遅延がある状態空間モデルをインポートする場合は、テキスト ボックスで開ループの不安定な極 (存在する場合) の数を指定します。値が正しくないと、PID コントローラーが実際のプラントを安定させられなくなることがあります。不安定な極とは、以下のような範囲にある極です。Re(s) > 0 (連続時間プラントの場合)
|z| > 1 (離散時間プラントの場合)
この場合、プラント内の純積分器 (s = 0) または (|z| > 1) は不安定な極とは見なされません。プラントが純積分器をもつプラントの
frdモデルである場合、最適な結果を得るには、周波数応答データが積分器の傾きを捕捉できるだけの低い周波数を必ず含んでいるようにします。[インポート] をクリックします。
PID 調整器により、インポートした操作点で新しい線形化プラントが計算されるか、指定した LTI モデルがインポートされます。アプリによって自動的にその新規プラントに対するコントローラーが設計され、新しい閉ループ システムの応答プロットが表示されます。アプリは [PID 調整器] タブに戻ります。このタブの [プラント] メニューには現在のコントローラーの設計に新しいプラントが選択されていることが反映されています。
モデルの初期条件での線形化
既定の設定では、PID 調整器を開くと、モデルの初期条件で定義される操作点においてモデルが線形化されます。別の操作点でモデルを線形化した後、既定の線形化に戻ることもできます。以下の処理を行います。
[プラント モデルの取得] ダイアログ ボックスで、[既定の操作点で Simulink モデルを線形化しています] をクリックします。
[インポート] をクリックします。PID 調整器によって新しい線形化プラントが計算され、その新規プラントに対するコントローラーが自動的に設計されて、新しい閉ループ システムの応答プロットが表示されます。アプリは [PID 調整器] タブに戻ります。このタブの [プラント] メニューには現在のコントローラーの設計に新しいプラントが選択されていることが反映されています。