2 自由度 PID コントローラーの設計
PID 調整器を使用すると、2 自由度の PID Controller (2DOF) ブロックおよび Discrete PID Controller (2DOF) ブロックを調整し、良好な設定点の追従と適切な外乱の抑制の両方を達成できます。
2 自由度 PID コントローラーについて
2 自由度の PID 補償器は、一般的に "ISA-PID 補償器" として知られており、フィードフォワード補償器およびフィードバック補償器と同じです (次の図を参照)。

フィードフォワード補償器は PD で、フィードバック補償器は PID です。PID Controller (2DOF) ブロックおよび Discrete PID Controller (2DOF) ブロックでは、設定点の重み b および c によって、フィードフォワード補償器の比例動作および微分動作の強度が決まります。詳細については、PID Controller (2DOF) ブロックおよび Discrete PID Controller (2DOF) ブロックのリファレンス ページを参照してください。
2 自由度 PID コントローラーの調整
PID 調整器は、PID ゲイン P、I、D および N を調整します。PID Controller (2DOF) ブロックでは、調整器が設定点の重み b および c も自動的に調整します。同じ手法を使用して、1 自由度の PID コントローラーの調整に使用される設計を改良し、解析できます。
Simulink® モデル内の 2 自由度の PID Controller ブロックを調整するには、次を行います。
ブロックをダブルクリックします。ブロック パラメーター ダイアログ ボックスで、[調整] をクリックします。
PID 調整器が開き、モデルの初期条件でモデルが線形化され、性能とロバスト性とのバランスを取る初期コントローラー設計が自動的に計算されます。この設計において PID 調整器は、PID ゲインだけでなく、必要に応じて設定点の重み
bおよびcの調整も行います。調整された値をすべての係数について確認するには、 [パラメーターの表示] をクリックします。
[パラメーターの表示] をクリックします。
PID 調整器での設計の解析で説明されているように、初期設計を解析し改良します。1 自由度の場合と同様に、同じ応答プロット、設計の調整およびオプションはすべて、2-DOF PID コントローラーの調整に使用可能です。
Simulink モデルでの PID 設計の検証での説明に従って、コントローラー設計を検証します。
重みが固定されたコントローラー タイプ
PID 調整器で PID Controller (2DOF) ブロックを調整する際は、[タイプ] メニューにコントローラー タイプを指定する追加のオプションが表示されます。これらのオプションには、PI-D および I-PD コントローラーの指定で説明されているコントローラーのような、設定点の重みが固定されたコントローラーが含まれています。
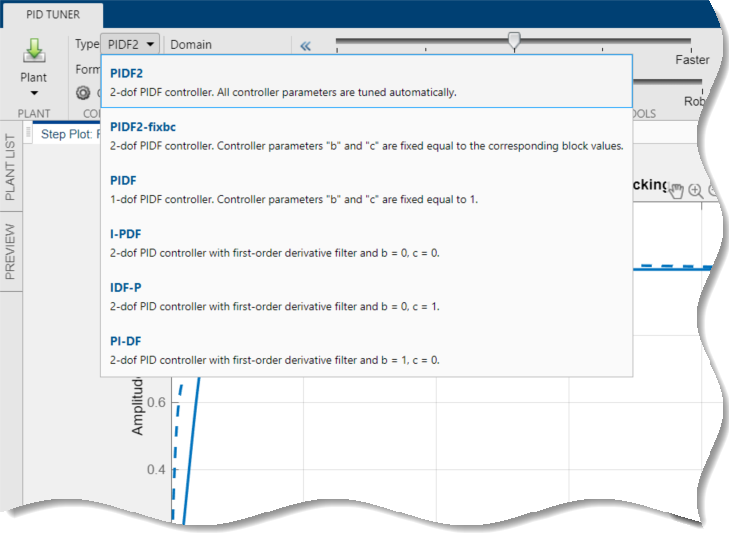
一部のタイプ オプションの可用性は、PID Controller (2DOF) ブロックのダイアログ ボックスにおける [コントローラー] 設定に依存します。
| タイプ | 説明 | ブロックでの [コントローラー] 設定 |
|---|---|---|
PIDF2 | 微分項にフィルターをもつ 2-DOF PID コントローラー。PID 調整器は、設定点の重みを含め、すべてのコントローラー パラメーターを調整します。 | PID |
PIDF2-fixbc | 微分項にフィルターをもつ 2-DOF PID コントローラー。PID 調整器は、設定点の重みをコントローラー ブロックで指定されている値に固定します。 | PID |
PIDF | b = 1 と c = 1 で固定された、動作が 1-DOF PIDF コントローラーと等価である 2-DOF コントローラー。 | PID |
I-PDF | b = 0 と c = 0 で固定された、微分項にフィルターをもつ 2-DOF PID コントローラー。 | PID |
IDF-P | b = 0 と c = 1 で固定された、微分項にフィルターをもつ 2-DOF PID コントローラー。 | PID |
PI-DF | b = 1 と c = 0 で固定された、微分項にフィルターをもつ 2-DOF PID コントローラー。 | PID |
PI2 | 2-DOF PI コントローラー。PID 調整器は、比例項での設定点の重み b を含め、すべてのコントローラー パラメーターを調整します。 | PI |
PI2-fixbc | 微分項にフィルターをもつ 2-DOF PI コントローラー。PID 調整器は、設定点の重み b をコントローラー ブロックで指定されている値に固定します。 | PI |
PI | b = 1 で固定された、動作が 1-DOF PI コントローラーと等価な 2-DOF コントローラー。 | PI |
PDF2 | 微分項にフィルターをもつ 2-DOF PD コントローラー (積分器なし)。PID 調整器は、設定点の重みを含め、すべてのコントローラー パラメーターを調整します。 | PD |
PDF2-fixbc | 微分項にフィルターをもつ 2-DOF PD コントローラー。PID 調整器は、設定点の重みをコントローラー ブロックで指定されている値に固定します。 | PD |
PD | b = 1 と c = 1 で固定された、動作が 1-DOF PD コントローラーと等価な 2-DOF コントローラー。 | PD |