Signal Modeling
Signal Processing Toolbox™ provides parametric modeling techniques that let you estimate a rational transfer function that describes a signal, system, or process. Use known information about a signal to find the coefficients of a linear system that models it. Approximate a given time-domain impulse response using Prony and Steiglitz-McBride ARX models. Find an analog or digital transfer function that matches a given complex frequency response. Model resonances using linear prediction filters.
Functions
Topics
- Linear Prediction and Autoregressive Modeling
Compare two methods for determining the parameters of a linear filter: autoregressive modeling and linear prediction.
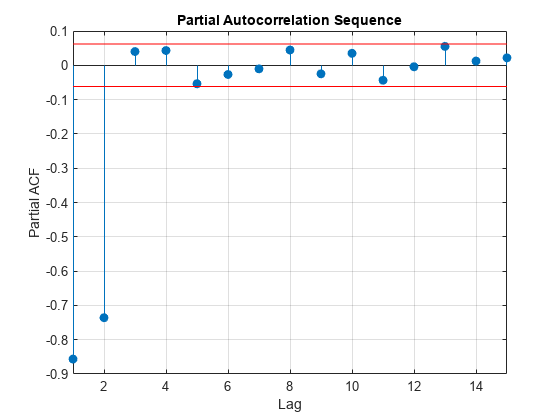
- AR Order Selection with Partial Autocorrelation Sequence
Assess the order of an autoregressive model using the partial autocorrelation sequence.
- Parametric Modeling
Study techniques that find the parameters for a mathematical model describing a signal, system, or process.
- Prediction Polynomial
Obtain the prediction polynomial from an autocorrelation sequence. Verify that the resulting prediction polynomial has an inverse that produces a stable all-pole filter.
Featured Examples

Linear Prediction and Autoregressive Modeling
Compare two methods for determining the parameters of a linear filter: autoregressive modeling and linear prediction.

Formant Estimation with LPC Coefficients
Estimate vowel formant frequencies using linear predictive coding.
AR Order Selection with Partial Autocorrelation Sequence
Assess the order of an autoregressive model using the partial autocorrelation sequence.