levinson
レビンソン・ダービン再帰法
説明
例
次の式で表される自己回帰過程の係数を推定します。
a = [1 0.1 -0.8 -0.27];
分散 0.4 のホワイト ノイズをフィルター処理することによって過程の実現を生成します。
v = 0.4; w = sqrt(v)*randn(15000,1); x = filter(1,a,w);
相関関数を推定します。負のラグの相関値を破棄します。レビンソン・ダービン再帰法を使用して、モデル係数を推定します。予測誤差が入力の分散に対応していることを確認します。
[r,lg] = xcorr(x,'biased');
r(lg<0) = [];
[ar,e] = levinson(r,numel(a)-1)ar = 1×4
1.0000 0.0772 -0.7954 -0.2493
e = 0.3909
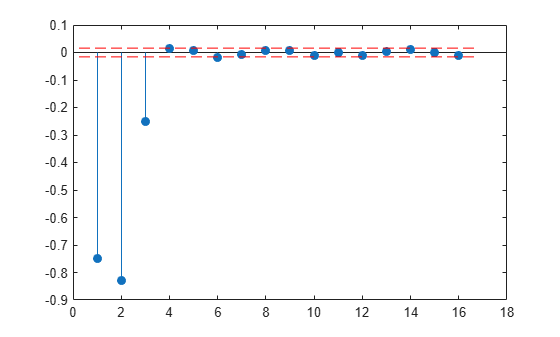
16 次モデルの反射係数を推定します。95% の信頼限界の外側に位置している反射係数のみが正しいモデル次数に対応していることを確認します。詳細については、偏自己相関列による AR 次数選択を参照してください。
[~,~,k] = levinson(r,16); stem(k,'filled') conf = sqrt(2)*erfinv(0.95)/sqrt(15000); hold on [X,Y] = ndgrid(xlim,conf*[-1 1]); plot(X,Y,'--r') hold off
次の式で表される自己回帰過程の係数を生成します。
a = [1 0.1 -0.8 -0.27];
分散が異なるホワイト ノイズをフィルター処理することにより、過程の実現を 5 件作成します。
nr = 5; v = rand(1,nr)
v = 1×5
0.8147 0.9058 0.1270 0.9134 0.6324
w = sqrt(v).*randn(15000,nr); x = filter(1,a,w);
相関関数を推定します。相互相関の項と負のラグの相関値を破棄します。レビンソン・ダービン再帰法を使用して、正しいモデル次数の予測誤差を推定し、その予測誤差が入力ノイズ信号の分散に対応することを確認します。
[r,lg] = xcorr(x,'biased');
[~,e] = levinson(r(lg>=0,1:nr+1:end),numel(a)-1)e = 5×1
0.7957
0.9045
0.1255
0.9290
0.6291
入力引数
出力引数
アルゴリズム
レビンソン・ダービン再帰法は、設定された確定的な自己相関列をもつ全極 IIR フィルターを求めるためのアルゴリズムです。この再帰法は、フィルター設計、コード化、スペクトル推定などで使用されています。levinson で生成されるフィルターは、最小位相となります。
levinson では、対称テプリッツ連立線形方程式を解けます。
ここで、r = [r(1) ... r(n + 1)] は入力自己相関ベクトルであり、r(i)* は r(i) の複素共役を表します。入力 r は、自己相関係数のベクトルで、ラグ 0 は最初の要素 r(1) です。
メモ
r が有効な自己相関列でない場合、解が存在する場合であっても、関数 levinson は NaN を返すことがあります。
このアルゴリズムは O(n2) フロップスを必要とし、n が大きい場合は、MATLAB® のバックスラッシュ コマンドよりはるかに効率的です。ただし、関数 levinson ではできるだけ高速に演算を行うために、低次の場合には \ を使用しています。
参照
[1] Ljung, Lennart. System Identification: Theory for the User. 2nd Ed. Upper Saddle River, NJ: Prentice Hall, 1999.
拡張機能
バージョン履歴
R2006a より前に導入