lpc
線形予測フィルター係数
説明
例
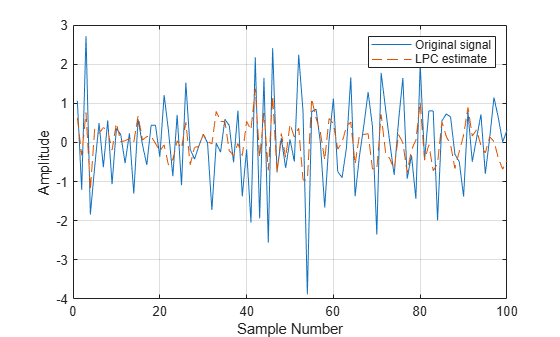
3 次の前方予測子を使用してデータ系列を予測します。予測と元の信号を比較します。
まず、正規化されたホワイト ガウス ノイズで駆動される自己回帰 (AR) 過程の出力として、信号データを作成します。立ち上がりの過渡特性を避けるため、AR 過程出力の後半の 4,096 サンプルを使用します。
noise = randn(50000,1); x = filter(1,[1 1/2 1/3 1/4],noise); x = x(end-4096+1:end);
予測子係数と推定信号を計算します。
a = lpc(x,3); est_x = filter([0 -a(2:end)],1,x);
予測した信号と元の信号を、それぞれ最後の 100 サンプルをプロットして比較します。
plot(1:100,x(end-100+1:end),1:100,est_x(end-100+1:end),'--') grid xlabel('Sample Number') ylabel('Amplitude') legend('Original signal','LPC estimate')
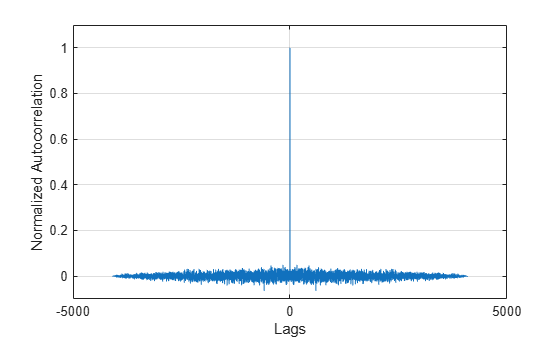
予測誤差と予測誤差の自己相関列を計算します。自己相関をプロットします。予測誤差は、3 次の AR 入力過程に対して期待されたとおり、近似的にホワイト ガウス ノイズになっています。
e = x-est_x; [acs,lags] = xcorr(e,'coeff'); plot(lags,acs) grid xlabel('Lags') ylabel('Normalized Autocorrelation') ylim([-0.1 1.1])
入力引数
出力引数
詳細
アルゴリズム
lpc では、最小二乗的に予測誤差を最小にすることで、前方線形予測子の係数が決定されます。フィルター設計や音声符号化に応用されます。
lpc では、自己回帰 (AR) モデリングの自己相関法を使用して、フィルター係数が求められます。生成されるフィルターは、たとえデータ シーケンスが正しい次数の AR 過程であっても、過程を正確にモデリングしない可能性があります。これは、自己相関法が、暗黙的にデータにウィンドウを適用しているためです。つまり、この手法では x の長さを超える信号サンプルは 0 であると仮定します。
lpc では、Xa = b の最小二乗の解が計算されます。ここで、
であり、m は x の長さです。正規方程式として、最小二乗の問題 を解くと、ユール・ウォーカー方程式に導かれます。
ここでは、r = [r(1) r(2) ... r(p+1)] は、xcorr を使用して計算された x に対する自己相関の推定です。ユール・ウォーカー方程式は、レビンソン・ダービン アルゴリズム (levinson を参照) を使用して、O(p2) フロップで解かれます。
参照
[1] Jackson, L. B. Digital Filters and Signal Processing. 2nd Edition. Boston: Kluwer Academic Publishers, 1989, pp. 255–257.