aryule
自己回帰全極モデル パラメーター — ユール・ウォーカー法
説明
例
多項式係数のベクトルを使用し、1024 サンプルのホワイト ノイズをフィルター処理することで AR(4) を生成します。再現可能な結果が必要な場合は、乱数発生器をリセットします。ユール・ウォーカー法を使用して係数を推定します。
rng default
A = [1 -2.7607 3.8106 -2.6535 0.9238];
y = filter(1,A,0.2*randn(1024,1));
arcoeffs = aryule(y,4)arcoeffs = 1×5
1.0000 -2.7262 3.7296 -2.5753 0.8927
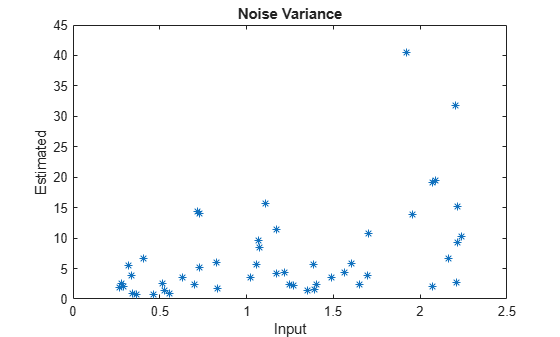
毎回入力ノイズの分散を変えながら過程の実現を 50 件作成します。ユール・ウォーカー法により推定した分散を実際の値と比較します。
nrealiz = 50; noisestdz = rand(1,nrealiz)+0.5; randnoise = randn(1024,nrealiz); noisevar = zeros(1,nrealiz); for k = 1:nrealiz y = filter(1,A,noisestdz(k) * randnoise(:,k)); [arcoeffs,noisevar(k)] = aryule(y,4); end plot(noisestdz.^2,noisevar,'*') title('Noise Variance') xlabel('Input') ylabel('Estimated')
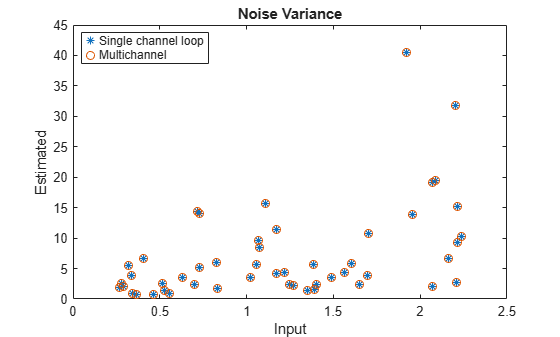
関数のマルチチャネル構文を使用して手順を繰り返します。
Y = filter(1,A,noisestdz.*randnoise); [coeffs,variances] = aryule(Y,4); hold on plot(noisestdz.^2,variances,'o') hold off legend('Single channel loop','Multichannel','Location','best')
多項式係数のベクトルを使用し、1024 サンプルのホワイト ノイズをフィルター処理することで AR(2) を生成します。再現可能な結果が必要な場合は、乱数発生器をリセットします。
rng default
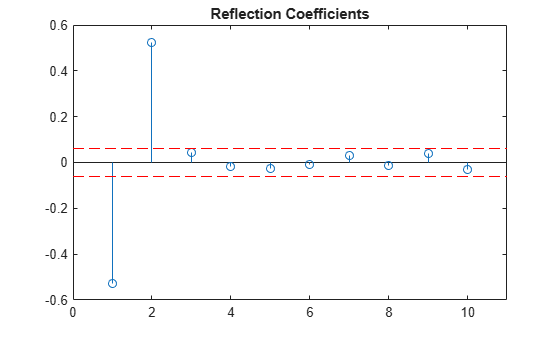
y = filter(1,[1 -0.75 0.5],0.2*randn(1024,1));ユール・ウォーカー法を使用して、AR(10) モデルを過程に当てはめます。反射係数を出力してプロットします。最初の 2 つの係数は 95% の信頼限界の外側に位置しています。これは、AR(10) モデルが、データの時間依存性をかなり過大に推定していることを示します。詳細については、偏自己相関列による AR 次数選択を参照してください。
[ar,nvar,rc] = aryule(y,10); stem(rc) xlim([0 11]) conf95 = sqrt(2)*erfinv(0.95)/sqrt(1024); [X,Y] = ndgrid(xlim,conf95*[-1 1]); hold on plot(X,Y,'--r') hold off title('Reflection Coefficients')
入力引数
出力引数
詳細
アルゴリズム
関数 aryule は、サンプル自己相関列のバイアス付き推定にレビンソン・ダービン再帰法を使用して、パラメーターを計算します。
参照
[1] Hayes, Monson H. Statistical Digital Signal Processing and Modeling. New York: John Wiley & Sons, 1996.
拡張機能
バージョン履歴
R2006a より前に導入