armcov
自己回帰全極モデル パラメーター — 修正共分散法
説明
例
多項式係数のベクトルを使用し、1024 サンプルのホワイト ノイズをフィルター処理することで AR(4) を生成します。再現可能な結果が必要な場合は、乱数発生器をリセットします。修正共分散法を使用して係数を推定します。
rng default
A = [1 -2.7607 3.8106 -2.6535 0.9238];
y = filter(1,A,0.2*randn(1024,1));
arcoeffs = armcov(y,4)arcoeffs = 1×5
1.0000 -2.7741 3.8404 -2.6841 0.9360
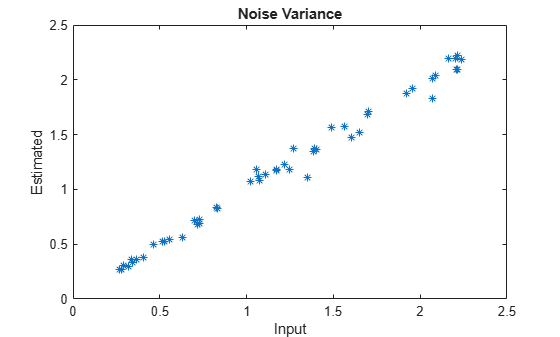
毎回入力ノイズの分散を変えながら過程の実現を 50 件作成します。修正共分散法により推定した分散を実際の値と比較します。
nrealiz = 50; noisestdz = rand(1,nrealiz)+0.5; randnoise = randn(1024,nrealiz); noisevar = zeros(1,nrealiz); for k = 1:nrealiz y = filter(1,A,noisestdz(k) * randnoise(:,k)); [arcoeffs,noisevar(k)] = armcov(y,4); end plot(noisestdz.^2,noisevar,'*') title('Noise Variance') xlabel('Input') ylabel('Estimated')
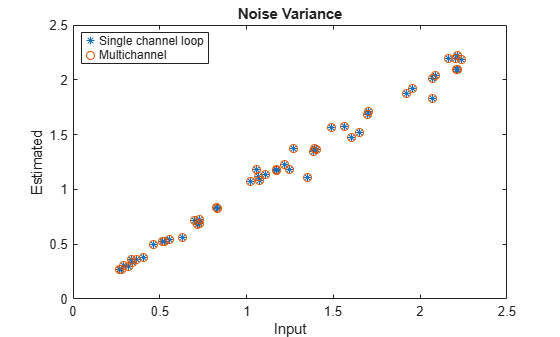
関数のマルチチャネル構文を使用して手順を繰り返します。
Y = filter(1,A,noisestdz.*randnoise); [coeffs,variances] = armcov(Y,4); hold on plot(noisestdz.^2,variances,'o') hold off legend('Single channel loop','Multichannel','Location',"best")
入力引数
出力引数
詳細
拡張機能
バージョン履歴
R2006a より前に導入