予測多項式
この例は、自己相関列から予測多項式を求める方法を示しています。この例では、結果として得られる予測多項式が安定な全極フィルターを生成する逆数をもつことも示します。全極フィルターを使用して広義定常性ホワイト ノイズ列をフィルター処理して、広義定常性自己回帰過程を生成することができます。
以下によって定義された自己相関列を作成します。
k = 0:2; rk = (24/5)*2.^(-k)-(27/10)*3.^(-k);
次のように ac2poly を使用して次数 2 の予測多項式を求めます。
A = ac2poly(rk);
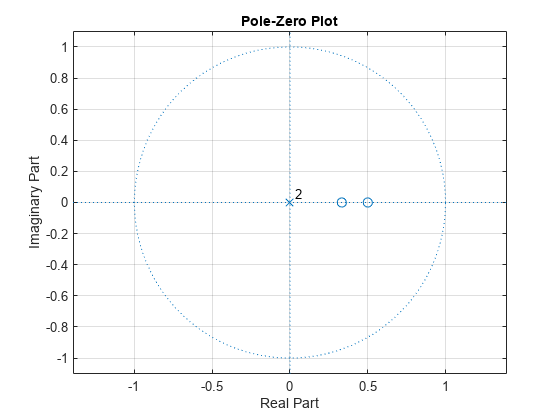
FIR フィルターの極-零点プロットを調べて、零点が単位円の中にあることを確かめます。
zplane(A,1) grid
逆全極フィルターは極が単位円内にあるとき安定です。
zplane(1,A)
grid
title('Poles and Zeros')
全極フィルターを使用して、ホワイト ノイズ列から広義定常性 AR(2) 過程の実現を生成します。再現性のある結果を得るために、乱数発生器を既定の状態に設定します。
rng default
x = randn(1000,1);
y = filter(1,A,x);AR(2) 実現のサンプルの自己相関列を計算して、サンプルの自己相関列が真の自己相関列に近いことを示します。
[xc,lags] = xcorr(y,2,'biased');
[xc(3:end) rk']ans = 3×2
2.2401 2.1000
1.6419 1.5000
0.9980 0.9000