invfreqz
周波数応答データからの離散時間フィルター パラメーターの同定
構文
説明
例
簡単な伝達関数を周波数応答データに変換し、次に、元のフィルター係数に戻します。関数のゼロと極をスケッチします。
a = [1 2 3 2 1 4]; b = [1 2 3 2 3]; [h,w] = freqz(b,a,64); [bb,aa] = invfreqz(h,w,4,5)
bb = 1×5 complex
1.0000 + 0.0000i 2.0000 + 0.0000i 3.0000 + 0.0000i 2.0000 + 0.0000i 3.0000 + 0.0000i
aa = 1×6
1.0000 2.0000 3.0000 2.0000 1.0000 4.0000
zplane(bb,aa)
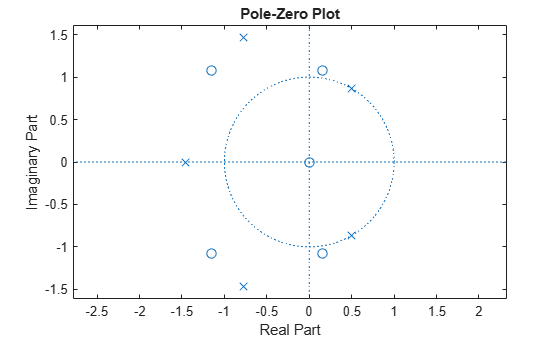
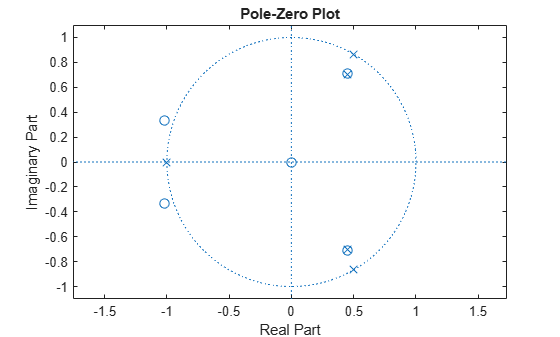
bb および aa は、b および a とそれぞれ等価です。ただし、システムは単位円の外側に極をもつため不安定です。invfreqz の反復アルゴリズムを使用して、システムに対する安定近似を求めます。極が単位円内にあることを検証します。
[bbb,aaa] = invfreqz(h,w,4,5,[],30)
bbb = 1×5 complex
0.2427 + 0.0000i 0.2788 + 0.0000i 0.0069 + 0.0000i 0.0971 + 0.0000i 0.1980 + 0.0000i
aaa = 1×6
1.0000 -0.8944 0.6954 0.9997 -0.8933 0.6949
zplane(bbb,aaa)
入力引数
出力引数
アルゴリズム
既定の設定では、invfreqz では方程式誤差法を使用して、データに対する最適なモデルが同定されます。この手法は、次で b と a を求めます。
ここでは、連立線形方程式を作成し、MATLAB® の \ 演算子で解くことにより、b と a を求めます。ここでは、A(ω(k)) and B(ω(k)) は、それぞれ周波数 ω(k) における多項式 a と b のフーリエ変換です。また、n は周波数点 (h と w の長さ) の数です。このアルゴリズムは、Levi (参考文献[1]) に基づいています。
優れた ("出力誤差") アルゴリズムでは、初期推定値として最初のアルゴリズムの出力が使用され、反復探索[2]に対して、減衰付きガウス・ニュートン法が使用されます。この方法では、実際の周波数応答点と希望の周波数応答点の間の二乗誤差の重み付き和を最小化するという、直接的な問題を解けます。
参照
[1] Levi, E. C. “Complex-Curve Fitting.” IRE Transactions on Automatic Control. Vol. AC-4, 1959, pp. 37–44.
[2] Dennis, J. E., Jr., and R. B. Schnabel. Numerical Methods for Unconstrained Optimization and Nonlinear Equations. Englewood Cliffs, NJ: Prentice-Hall, 1983.