sim
Simulink モデルのプログラムによるシミュレーションの実行とスクリプト化
構文
説明
Simulink.SimulationInput オブジェクトの構文
simout = sim(simin)Simulink.SimulationInput オブジェクトで定義されたプロパティに従って Simulink® モデルの 1 つ以上のシミュレーションを実行します。
siminがスカラーのSimulink.SimulationInputオブジェクトの場合、simoutはスカラーのSimulink.SimulationOutputオブジェクトになります。siminがSimulink.SimulationInputオブジェクトのベクトル、行列、または配列の場合、simoutはsiminと同じ次元をもつSimulink.SimulationOutputオブジェクトのベクトル、行列、または配列になります。
SimulationInput オブジェクトを使用してシミュレーションのオプションや入力を構成できます。これには以下が含まれます。
シミュレートするモデル
外部入力データのソースの変数またはファイル
シミュレーションに使用するブロック パラメーターの値
シミュレーションに使用するモデル コンフィギュレーション パラメーターの値
SimulationInput オブジェクトのプロパティでモデルまたはブロックのパラメーターの値を変更すると、その値がシミュレーション中に変更され、シミュレーションの終了時に元に戻されます。
SimulationInput オブジェクトを使用してプログラミングによるシミュレーションを構成すると、使用する関数を sim から parsim や batchsim などの他の関数に簡単に切り替えることができます。
詳細については、プログラムによるシミュレーションの実行を参照してください。
simout = sim(simin,Name=Value)Simulink.SimulationInput オブジェクト simin で定義されたプロパティに従ってモデルをシミュレートします。
Simulink.SimulationInput の構文でサポートされる名前と値の引数のリストについては、Simulink.SimulationInput オブジェクトの構文を参照してください。
モデルの構文
simout = sim(mdl)mdl をシミュレートします。
[単一のシミュレーション出力] パラメーターがモデルで有効になっている場合、
simoutはSimulink.SimulationOutputオブジェクトになります。[単一のシミュレーション出力] パラメーターがモデルで有効になっていない場合、
simoutはシミュレーション時間を格納したベクトルになります。詳細については、複数の出力引数を返す構文は非推奨を参照してください。
simout = sim(mdl,Name=Value)mdl をシミュレートします。たとえば、パラメーターの名前と値を名前と値の引数として指定することで、シミュレーション用のモデル コンフィギュレーション パラメーターの値を変更できます。
関数 sim に入力を提供してモデル コンフィギュレーション パラメーターを変更すると、その変更がシミュレーション中に適用され、シミュレーションの終了時に元に戻されます。
モデルの構文でサポートされる名前と値の引数のリストについては、モデルの構文を参照してください。
simout = sim(mdl,paramstruct)paramstruct で指定されたモデル コンフィギュレーション パラメーターの値を使用してモデル mdl をシミュレートします。
例
Simulink.SimulationInput オブジェクトを使用して、シミュレートするモデルとは別個にシミュレーション用の構成を保存できます。Simulink.SimulationInput オブジェクトの構成が、シミュレーション用にモデルに適用されます。シミュレーション後に、変更されたモデル設定は元の値に戻ります。
モデル IntegrateSine を開きます。このモデルでは Integrator ブロックを使用して Sine Wave ブロックの出力を積分します。Integrator ブロックからの出力が Outport ブロックに接続されます。

mdl = "IntegrateSine";
open_system(mdl)モデル IntegrateSine のシミュレーション構成を保存するための Simulink.SimulationInput オブジェクトを作成します。
simIn = Simulink.SimulationInput(mdl);
関数 setModelParameter を使用して、ode45 ソルバーを使用し、終了時間 20 秒までシミュレートするように SimulationInput オブジェクトを構成します。
simIn = setModelParameter(simIn,"Solver","ode45",... "StopTime","20");
関数 setBlockParameter を使用して、Sine Wave ブロックの "Amplitude" パラメーターを 2 に設定するように SimulationInput オブジェクトを構成します。
blk = strcat(mdl,"/Sine Wave"); simIn = setBlockParameter(simIn,blk,"Amplitude","2");
Simulink.SimulationInput オブジェクト simIn に保存されている構成を使用してモデルをシミュレートします。
out = sim(simIn);
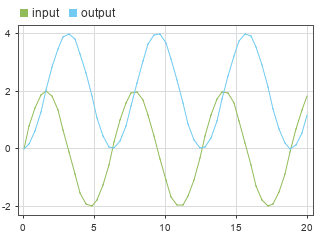
モデルは、ode45 ソルバーおよび Sine Wave ブロックの振幅 2 を使用して 20 秒間シミュレートします。
Simulink.SimulationInput オブジェクトの配列を使用してシミュレーションのセットを構成すると、関数 sim の単一の呼び出しにより、高速リスタートを使用してシミュレーションのセットを実行できます。高速リスタートでは、シミュレーションの複数の実行間でモデルをコンパイル済みの状態のままにすることで、シミュレーションの時間が短縮されます。
モデル IntegrateSine を開きます。このモデルでは Integrator ブロックを使用して Sine Wave ブロックの出力を積分します。Integrator ブロックからの出力が Outport ブロックに接続されます。
mdl = "IntegrateSine";
open_system(mdl)
6 つのシミュレーションのセットを実行し、各シミュレーションで Sine Wave ブロックに異なる周波数値を使用するとします。シミュレーションの周波数値を含むベクトルを作成します。
freqs = [0.5 1 1.5 2 2.5 3];
ブロック パラメーターを調整する場合は、変数を使用してパラメーターの値を定義できます。次に、ブロック パラメーターを調整するために、変数の値を変更します。
Sine Wave ブロックの "Frequency" パラメーターの値に使用する変数 freq を定義します。初期変数値には、現在のパラメーター値を使用します。
blk = mdl + "/Sine Wave"; freq = str2double(get_param(blk,"Frequency"));
Sine Wave ブロックの Frequency パラメーター値を freq に設定します。
set_param(blk,"Frequency","freq")
for ループで 6 つの Simulink.SimulationInput オブジェクトの配列を作成し、関数 setVariable を使用して周波数のベクトルからの値を使用するように各オブジェクトを構成します。
for k = length(freqs):-1:1 simIn(k) = Simulink.SimulationInput(mdl); simIn(k) = setVariable(simIn(k),"freq",freqs(k)); end
関数 sim を使用して SimulationInput オブジェクト simIn の配列で定義されているシミュレーションを実行します。名前と値の引数 UseFastRestart を使用して高速リスタートを有効にします。名前と値の引数 UseFastRestart は、最初の入力引数が Simulink.SimulationInput オブジェクトである場合にのみサポートされます。最初の引数がモデルの名前である場合に高速リスタートを使用するには、名前と値の引数 FastRestart を使用します。
out = sim(simIn,"UseFastRestart","on");
[25-Jan-2026 16:55:02] Running simulations... [25-Jan-2026 16:55:03] Completed 1 of 6 simulation runs [25-Jan-2026 16:55:03] Completed 2 of 6 simulation runs [25-Jan-2026 16:55:04] Completed 3 of 6 simulation runs [25-Jan-2026 16:55:04] Completed 4 of 6 simulation runs [25-Jan-2026 16:55:04] Completed 5 of 6 simulation runs [25-Jan-2026 16:55:04] Completed 6 of 6 simulation runs
進行状況メッセージを表示せずにシミュレーションの同じセットを実行するには、名前と値の引数 ShowProgress を off として指定します。
out = sim(simIn,"UseFastRestart","on","ShowProgress","off");
シミュレーション マネージャーを使用してシミュレーションの進行状況を監視するには、名前と値の引数 ShowSimulationManager を on として指定します。シミュレーション マネージャーの詳細については、シミュレーション マネージャーを参照してください。
out = sim(simIn,"UseFastRestart","on",... "ShowProgress","off","ShowSimulationManager","on");
シミュレーション出力 out は、各シミュレーションのメタデータおよび結果を含む Simulink.SimulationOutput オブジェクトの配列です。出力配列の SimulationOutput オブジェクトの順序は、入力配列の SimulationInput オブジェクトの順序に対応しています。たとえば、インデックス 1 の SimulationOutput オブジェクトには、インデックス 1 の SimulationInput オブジェクトを使用して構成されたシミュレーションの結果が含まれます。
最初のシミュレーションの結果についてログに記録された出力信号にアクセスします。そのシミュレーションでは周波数値 0.5 が使用されました。
youtPt5 = out(1).yout
youtPt5 =
Simulink.SimulationData.Dataset 'yout' with 1 element
Name BlockPath
______ _____________________
1 [1x1 Signal] output IntegrateSine/Outport
- Use braces { } to access, modify, or add elements using index.
モデル IntegrateSine を開きます。このモデルでは Integrator ブロックを使用して Sine Wave ブロックの出力を積分します。Integrator ブロックからの出力が Outport ブロックに接続されます。
mdl = "IntegrateSine";
open_system(mdl);
現在のコンフィギュレーション パラメーター値を使用してモデルをシミュレートします。
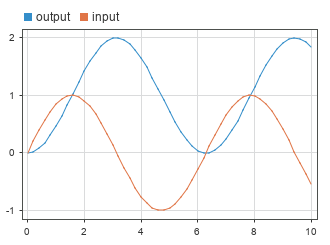
out = sim(mdl);
シミュレーションは 10 秒間実行され、振幅 1 の正弦波が積分されます。
関数 set_param を使用して、モデルのモデル コンフィギュレーション パラメーター値およびブロック パラメーター値を変更できます。
ode45 ソルバーおよび終了時間 20 秒を使用するようにモデルを構成します。
set_param(mdl,"Solver","ode45","StopTime","20")
Sine Wave ブロックの "Amplitude" パラメーターを 2 に設定します。
blk = strcat(mdl,"/Sine Wave"); set_param(blk,"Amplitude","2")
関数 set_param を使用してコンフィギュレーション パラメーター値またはブロック パラメーター値を変更すると、その変更がブロック線図に適用され、モデル ファイルで変更が未保存 (ダーティ) になります。関数 sim を再度呼び出すと、モデルを保存していなくても、シミュレーションは現在のモデル コンフィギュレーションの一部である新しいパラメーター値を使用します。
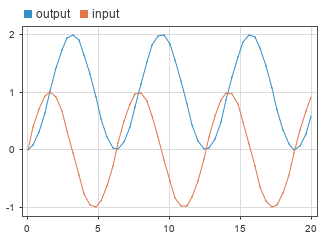
out2 = sim(mdl);
シミュレーションは 20 秒間実行され、振幅 2 の正弦波が積分されます。

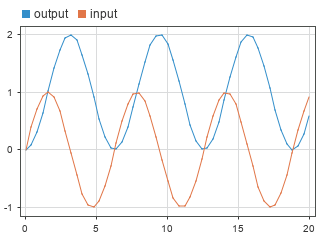
関数 sim の名前と値の引数としてシミュレーションのコンフィギュレーション パラメーターを指定することで、モデル コンフィギュレーション パラメーター値で異なる値を使用するようにモデルのシミュレーションを構成できます。指定したパラメーター値はそのシミュレーションに適用されますが、シミュレーションが完了すると元に戻されます。
関数 sim の名前と値の引数として指定できるのはモデル コンフィギュレーション パラメーター値のみであり、ブロック パラメーター値は指定できません。単一の入力でシミュレーションのモデル コンフィギュレーション パラメーターの値、ブロック パラメーターの値、および変数の値を指定するには、代わりに Simulink.SimulationInput オブジェクトを使用します。
モデル IntegrateSine を開きます。このモデルでは Integrator ブロックを使用して Sine Wave ブロックの出力を積分します。Integrator ブロックからの出力が Outport ブロックに接続されます。
mdl = "IntegrateSine";
open_system(mdl);
ソルバー ode45 および終了時間 20 秒を使用してモデルをシミュレートするものとします。関数 sim の名前と値の引数としてシミュレーションの Solver 値および StopTime 値を指定します。
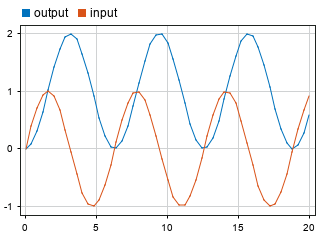
out = sim(mdl,"Solver","ode45","StopTime","20");
モデルでソルバー ode45 を使用してシミュレーション時間 20 秒までシミュレートします。
モデル コンフィギュレーション パラメーターの名前と値の構造体を使用してモデルのシミュレーションを構成できます。構造体内のコンフィギュレーション パラメーター値が、シミュレーション用にモデルに適用されます。シミュレーション後に、変更されたモデル設定は元の値に戻ります。
構造体の入力で指定できるのはモデル コンフィギュレーション パラメーター値のみであり、シミュレーションで使用する別のブロック パラメーター値や変数値は指定できません。単一の入力でシミュレーションのモデル コンフィギュレーション パラメーターの値、ブロック パラメーターの値、および変数の値を指定するには、代わりに Simulink.SimulationInput オブジェクトを使用します。
モデル IntegrateSine を開きます。このモデルでは Integrator ブロックを使用して Sine Wave ブロックの出力を積分します。Integrator ブロックからの出力が Outport ブロックに接続されます。
mdl = "IntegrateSine";
open_system(mdl)
ode45 ソルバーおよび終了時間 20 秒を使用するようにシミュレーションを構成する構造体 SimConfig を作成します。構造体には、シミュレーションで変更する各コンフィギュレーション パラメーターのフィールドが含まれています。各フィールドの名前は各パラメーターのプログラム上の名前に対応しています。各フィールドの値ではシミュレーションでそのパラメーターに使用する値を指定します。
simConfig.Solver = "ode45"; simConfig.StopTime = "20";
構造体のモデル コンフィギュレーション パラメーター値を使用してモデルをシミュレートします。
out = sim(mdl,simConfig);
モデルで ode45 ソルバーを使用してシミュレーション時間 20 秒までシミュレートします。
Simulink.ConfigSet オブジェクトは、モデル コンフィギュレーション パラメーターの値のセットを保存します。Simulink.ConfigSet オブジェクトを関数 sim への入力として指定できます。オブジェクトのコンフィギュレーション セットが、シミュレーション用にモデルに適用されます。シミュレーション後に、元のコンフィギュレーション セットがモデルで復元されます。
Simulink.Configset オブジェクトは、モデル コンフィギュレーション パラメーターの値のみを保存します。単一の入力でシミュレーションのモデル コンフィギュレーション パラメーターの値、ブロック パラメーターの値、および変数の値を指定するには、代わりに Simulink.SimulationInput オブジェクトを使用します。
モデル IntegrateSine を開きます。このモデルでは Integrator ブロックを使用して Sine Wave ブロックの出力を積分します。Integrator ブロックからの出力が Outport ブロックに接続されます。
mdl = "IntegrateSine";
open_system(mdl)
関数 getActiveConfigSet を使用して、現在のモデル コンフィギュレーションの Simulink.ConfigSet オブジェクトを取得します。
mdlConfig = getActiveConfigSet(mdl);
関数 copy を使用して、変更する Simulink.ConfigSet オブジェクトのコピーを作成します。
simConfig = copy(mdlConfig);
ソルバー ode45 および終了時間 20 秒を使用するように Simulink.ConfigSet オブジェクト simConfig を変更します。
set_param(simConfig,"Solver","ode45","StopTime","20");
Simulink.Configset オブジェクト simConfig のコンフィギュレーション パラメーターを使用してモデルをシミュレートします。
out = sim(mdl,simConfig);
モデルで ode45 ソルバーを使用してシミュレーション時間 20 秒までシミュレートします。
入力引数
名前と値の引数
出力引数
ヒント
関数
simがいずれの構文でも必ず同じ形式で結果を返すようにするには、[単一のシミュレーション出力] パラメーターを有効にしてモデルを保存します。このオプションが有効になっている場合、シミュレーションのすべてのログ データとシミュレーション メタデータ (タイミング情報や診断など) をそれぞれ含む 1 つ以上のSimulink.SimulationOutputオブジェクトとしてシミュレーション結果が返されます。すべてのシミュレーション データとシミュレーション メタデータを単一のオブジェクトで返すことで、複数のシミュレーションの結果を簡単に解析できます。関数
simを使用してシミュレーションを実行すると、エラーが発生するか指定した終了時間に達するまでシミュレーションが実行されます。シミュレーション中にシミュレーション実行の制御やパラメーター値の調整が可能なプログラムによるシミュレーションを実行またはスクリプト化するには、Simulationオブジェクトを使用します。 (R2024a 以降)詳細については、プログラムによるシミュレーションの実行を参照してください。シミュレーションの操作には、MATLAB コマンド ウィンドウと Simulink エディターの両方を使用できます。関数
set_paramを使用してシミュレーション コマンドを発行します。詳細については、プログラムによるシミュレーションの実行を参照してください。終了時間を無限にしてモデルをシミュレートする場合、MATLAB コマンド ウィンドウから Ctrl + C を押してシミュレーションを停止します。この場合、シミュレーションが停止し、シミュレーション結果は MATLAB ワークスペースに保存されません。
時間、状態、出力のログ記録の構成には [コンフィギュレーション パラメーター] ダイアログ ボックスを使用します。[モデル化] タブの [設定] で、[モデル設定] をクリックします。[コンフィギュレーション パラメーター] ダイアログ ボックスで [データのインポート/エクスポート] を選択します。
モデル全体で信号のログを記録するには、信号ログを使用するか、To Workspace ブロックや Record ブロックなどのログ記録ブロックを使用します。信号ログの詳細については、信号ログを使用した信号データの保存を参照してください。