Model
モデル階層の作成のための別のモデルの参照
ライブラリ:
Simulink /
Ports & Subsystems
HDL Coder /
Ports & Subsystems
説明
Model ブロックは指定されたモデルを参照します。参照モデルの最上位の入力端子と出力端子に対応する入力端子と出力端子を表示します。これらの端子を使用すると、参照モデルを親モデル内の他のブロックに接続できます。
Model ブロックが同様の機能をもつ別のブロックよりも目的に適しているかどうか確認するには、Simulink コンポーネントのタイプの検討およびSimulink コンポーネントの機能の比較を参照してください。
Model ブロックを含むモデルを参照する方法については、既存のモデルの参照を参照してください。
既定では、Model ブロックは参照モデルのコンテンツ表現を表示します。詳細については、モデル コンポーネントの内容のプレビューを参照してください。参照モデルの内容を表示するには、Model ブロックをダブルクリックします。
Simulink® Coder™ のライセンスがある場合は、モデルを保護することで、参照モデルの実装の詳細を隠すことができます。モデルを保護するには、コンテンツを隠すためのモデルの保護 (Simulink Coder)を参照してください。保護モデルを参照するには、サードパーティからの保護モデルの参照を参照してください。
例
Model ブロックを使用してモデルを別のモデルに含めることができます。各 Model ブロックは "モデル参照"、つまり別のモデルへの参照です。モデルは何度でも参照できるので、同じものを繰り返しコピーする必要がなく、同じモデルを複数の異なるモデルから参照できます。
例を開きます。この例には BasicCounterAlgorithm という名前のモデルが含まれています。
モデルを参照する前に、その構成、インターフェイス、および内容を検討します。
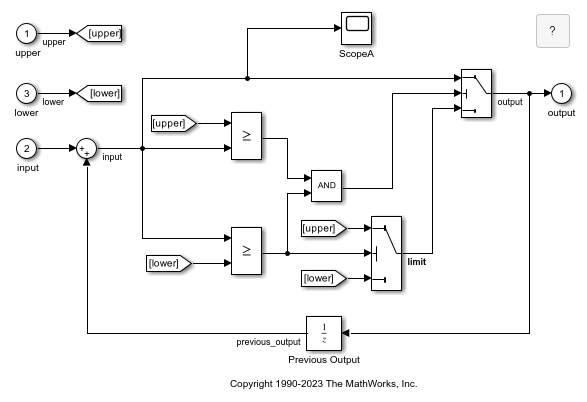
BasicCounterAlgorithm という名前のモデルはカウンター アルゴリズムを表しており、固定ステップの離散ソルバーを使用しています。
モデルのインターフェイスを表示するには、Simulink ツールストリップの [モデル化] タブの [設計] ギャラリーで [インターフェイス ビュー] を選択します。コンポーネント インターフェイス ビューが開きます。

モデルには入力端子が 3 つと出力端子が 1 つあります。
UpperLimitという名前の入力端子はカウンターの上限を提供します。LowerLimitという名前の入力端子はカウンターの下限 (開始値) を提供します。Inputという名前の入力端子はタイム ステップごとにカウンターをインクリメントする値を提供します。Countという名前の出力端子は現在のカウントを提供します。
新しいモデルで、Model ブロックを追加します。
プロパティ インスペクターで [モデル名] を BasicCounterAlgorithm に設定します。

ブロック アイコンの情報を見やすくするために、重なっている情報がなくなるまで Model ブロックの隅をドラッグします。

Model ブロック アイコンでは以下が表示されます。
参照モデルの名前:
BasicCounterAlgorithmUpperLimit、Input、およびLowerLimitという名前の入力端子Countという名前の出力端子
固定ステップの離散シミュレーション用に最上位モデルを構成します。
Simulink ツールストリップの [モデル化] タブで [モデル設定] をクリックします。
[コンフィギュレーション パラメーター] ダイアログ ボックスの [ソルバー] ペインで [タイプ] を
[Fixed-step]、[ソルバー] を[discrete (no continuous states)]に設定します。[OK] をクリックします。
参照モデルの予期される入出力に対応する入出力を Model ブロックに接続します。
カウンターの上限を表すために、Constant ブロックを追加して [定数値] を
100に設定します。次に、そのブロックを "UpperLimit" 端子に接続します。カウンターのインクリメントを表すために、Constant ブロックを追加して [定数値] を
1に設定します。次に、そのブロックを "Input" 端子に接続します。カウンターの下限を表すために、Constant ブロックを追加して [定数値] を
0に設定します。次に、そのブロックを "LowerLimit" 端子に接続します。プロットでカウンター出力を表示するために、Scope ブロックを追加します。次に、そのブロックを "Count" 端子に接続します。

Simulink ツールストリップの [モデル化] タブで [実行] をクリックします。

最上位モデルでシミュレートされ、参照モデルが実行されます。スコープ ウィンドウでシミュレーションの出力カウントが表示されます。
モデル SecondOrderSystemTop を開きます。このモデルには、2 次システムのモデルを参照する Model ブロックに入力信号を提供する Ramp ブロックが含まれています。Model ブロックの出力信号は Outport ブロックに接続されます。
topmdl = "SecondOrderSystemTop";
open_system(topmdl)
参照モデル内を移動するには、Model ブロックをダブルクリックします。あるいは、Model ブロックの Simulink.BlockPath オブジェクトを作成し、関数 open を使用してモデルの階層構造のコンテキストで参照モデルを開きます。
mdlblkpath = Simulink.BlockPath(topmdl + "/Model");
open(mdlblkpath)
参照モデルは、Transfer Fcn ブロックを使用して 2 次システムを実装し、システムへの変更または外乱をモデル化する Step ブロックを含みます。
システム伝達関数は、2 つのモデル ワークスペース変数 wn と z を使用して Transfer Fcn ブロックで指定します。これらの変数はシステムの固有振動数 (ラジアン/秒) とシステムの減衰係数を表します。
モデル ワークスペースで変数 wn の値を 100 として指定して、固有振動数 100 ラジアン/秒でシステムを構成します。
refmdl = "SecondOrderSystem"; mdlwksp = get_param(refmdl,"ModelWorkspace"); assignin(mdlwksp,"wn",100)
ステップ サイズ 0.01 秒でローカル ソルバーを使用するように参照モデルを構成します。プロパティ インスペクターまたは [ブロック パラメーター] ダイアログ ボックスを使用して、最上位モデルから参照モデルの設定を構成できます。
プロパティ インスペクターを開きます。[モデル化] タブで [設計] セクションを展開し、[プロパティ インスペクター] を選択するか、Ctrl+Shift+I を押します。
参照モデルの [コンフィギュレーション パラメーター] ダイアログ ボックスを開くには、Model ブロックを選択します。次に、プロパティ インスペクターで [ソルバー] セクションを展開し、[ローカル ソルバーを使用] パラメーターの横にあるハイパーリンクをクリックします。
モデルの階層構造内で参照されている場合にローカル ソルバーを使用するようにモデルを構成します。[コンフィギュレーション パラメーター] ダイアログ ボックスの [モデル参照] ペインで、[モデルの参照時にローカル ソルバーを使用] を選択します。
ローカル ソルバーとして固定ステップ
ode3を選択します。[ソルバー] ペインの [タイプ] リストから[Fixed-step]を選択します。次に、[ソルバー] リストから[ode3 (Bogacki-Shampine)]を選択します。ローカル ソルバーのステップ サイズを 0.01 秒に設定します。[ソルバー] ペインで、[ソルバーの詳細] を展開します。次に、[固定ステップ サイズ (基本サンプル時間)] ボックスに「
0.01」と入力します。[OK] をクリックします。
あるいは、関数 set_param を使用してパラメーターを構成します。
set_param(refmdl,UseModelRefSolver="on",... SolverType="Fixed-Step",Solver="ode3",FixedStep="0.01")
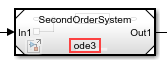
最上位モデルの Model ブロックに、指定したローカル ソルバーが示されます。

モデル参照の "通信ステップ サイズ" を指定します。通信ステップ サイズは、親ソルバーとローカル ソルバーがデータを交換するタイミングを指定し、最上位モデルの離散サンプル時間として登録されます。
最上位モデルの Ramp ブロックの傾きは 0.2 で、最上位ソルバーはステップ サイズ 0.2 秒を使用します。最上位モデルからの入力信号は 2 次システムのダイナミクスに比べてゆっくりと変化するため、シミュレーション結果の精度に大きな影響を与えることなく、通信ステップ サイズをローカル ソルバーのステップ サイズよりも大幅に大きくすることができます。
通信ステップ サイズを 0.4 秒に指定します。Model ブロックを選択します。次に、プロパティ インスペクターの [ソルバー] の下の [通信ステップ サイズ] ボックスに「0.4」と入力します。
あるいは、関数 set_param を使用して CommunicationStepSize パラメーターを設定します。
set_param(topmdl + "/Model",CommunicationStepSize="0.4")
ローカル ソルバーを使用してモデルをシミュレーションし、2 次システムの応答を計算します。
out = sim(topmdl);
シミュレーション結果を表示するには、シミュレーション データ インスペクターを開きます。[シミュレーション] タブの [結果の確認] で、[データ インスペクター] をクリックします。あるいは、関数 Simulink.sdi.view を呼び出します。
Simulink.sdi.view
別個のサブプロットに System Response および System Response - Top という名前の信号をプロットします。あるいは、関数 Simulink.sdi.loadView を使用して、この例で作成された FastSecondOrderSystem という名前のビューを読み込みます。
Simulink.sdi.loadView("FastSecondOrderSystem.mldatx");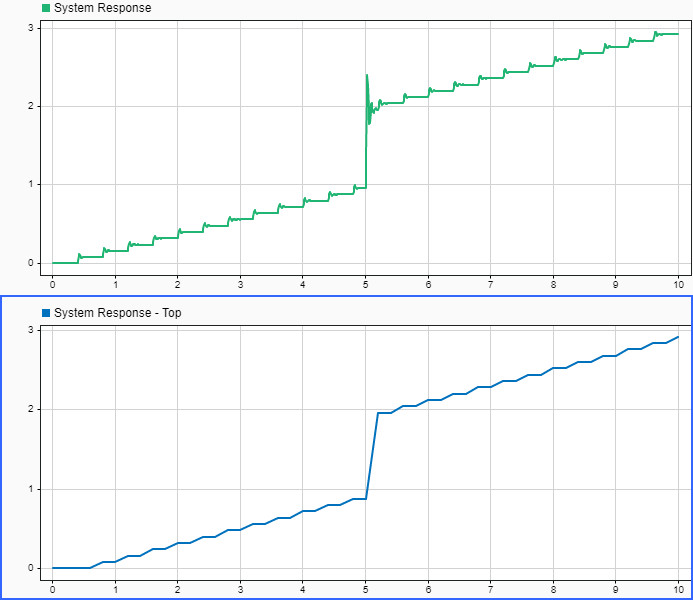
System Response 信号と System Response - Top 信号は同じ信号ですが、異なる場所にログが記録されます。System Response 信号は、ローカル ソルバーのステップ サイズによって決定されるレートで参照モデル内にログが記録されます。System Response - Top 信号は、最上位ソルバーのステップ サイズによって決定されるレートで、最上位モデルの Outport ブロックによってログが記録されます。ローカル ソルバーのステップ サイズは最上位ソルバーのステップ サイズよりもはるかに小さいため、System Response 信号は、Step ブロックの出力値が変化したときの入力信号の変化に対するシステム応答をより高い忠実度で取得します。
System Response 信号では、ローカル ソルバーが各通信ステップ間にゼロ次ホールドを使用して入力信号を内挿する効果がわかります。時間軸の 5 秒付近を拡大すると、ステップに対するシステム応答の振動がわかります。

モデル SecondOrderSystemTop を開きます。このモデルには、2 次システムのモデルを参照する Model ブロックに入力信号を提供する Ramp ブロックが含まれています。Model ブロックの出力信号は Outport ブロックに接続されます。
topmdl = "SecondOrderSystemTop";
open_system(topmdl)
参照モデル内を移動するには、Model ブロックをダブルクリックします。あるいは、Model ブロックの Simulink.BlockPath オブジェクトを作成し、関数 open を使用してモデルの階層構造のコンテキストで参照モデルを開きます。
mdlblkpath = Simulink.BlockPath(topmdl + "/Model");
open(mdlblkpath)
参照モデルは、Transfer Fcn ブロックを使用して 2 次システムを実装し、システムへの変更または外乱をモデル化する Step ブロックを含みます。
システム伝達関数は、2 つのモデル ワークスペース変数 wn と z を使用して Transfer Fcn ブロックで指定します。これらの変数はシステムの固有振動数 (ラジアン/秒) とシステムの減衰係数を表します。
モデル ワークスペースで変数 wn の値を 1 として指定して、固有振動数 1 ラジアン/秒でシステムを構成します。
refmdl = "SecondOrderSystem"; mdlwksp = get_param(refmdl,"ModelWorkspace"); assignin(mdlwksp,"wn",1)
ステップ サイズ 0.4 秒でローカル ソルバーを使用するように参照モデルを構成します。プロパティ インスペクターまたは [ブロック パラメーター] ダイアログ ボックスを使用して、最上位モデルから参照モデルの設定を構成できます。
プロパティ インスペクターを開きます。[モデル化] タブで [設計] セクションを展開し、[プロパティ インスペクター] を選択するか、Ctrl+Shift+I を押します。
参照モデルの [コンフィギュレーション パラメーター] ダイアログ ボックスを開くには、Model ブロックを選択します。次に、プロパティ インスペクターで [ソルバー] セクションを展開し、[ローカル ソルバーを使用] パラメーターの横にあるハイパーリンクをクリックします。
モデルの階層構造内で参照されている場合にローカル ソルバーを使用するようにモデルを構成します。[コンフィギュレーション パラメーター] ダイアログ ボックスの [モデル参照] ペインで、[モデルの参照時にローカル ソルバーを使用] を選択します。
ローカル ソルバーとして固定ステップ
ode3を選択します。[ソルバー] ペインの [タイプ] リストから[Fixed-step]を選択します。次に、[ソルバー] リストから[ode3 (Bogacki-Shampine)]を選択します。ローカル ソルバーのステップ サイズを 0.4 秒に設定します。[ソルバー] ペインで、[ソルバーの詳細] を展開します。次に、[固定ステップ サイズ (基本サンプル時間)] ボックスに「
0.4」と入力します。[OK] をクリックします。
あるいは、関数 set_param を使用してパラメーターを構成します。
set_param(refmdl,UseModelRefSolver="on",... SolverType="Fixed-Step",Solver="ode3",FixedStep="0.4")
最上位モデルの Model ブロックに、指定したローカル ソルバーが示されます。
ローカル ソルバーのステップ サイズが親ソルバーのステップ サイズより大きい場合、[通信ステップ サイズ] パラメーターを -1 に指定することで、"通信ステップ サイズ" を継承します。通信ステップ サイズは、親ソルバーとローカル ソルバーがデータを交換するタイミングを指定し、親モデルの離散サンプル時間として登録されます。
set_param(topmdl + "/Model",CommunicationStepSize="-1")
ローカル ソルバーを使用してモデルをシミュレーションし、2 次システムの応答を計算します。
out = sim(topmdl,StopTime="20");シミュレーション結果を表示するには、シミュレーション データ インスペクターを開きます。[シミュレーション] タブの [結果の確認] で、[データ インスペクター] をクリックします。あるいは、関数 Simulink.sdi.view を呼び出します。
Simulink.sdi.view
別個のサブプロットに System Response および System Response - Top という名前の信号をプロットします。あるいは、関数 Simulink.sdi.loadView を使用して、この例で作成された SlowSecondOrderSystem という名前のビューを読み込みます。
Simulink.sdi.loadView("SlowSecondOrderSystem.mldatx");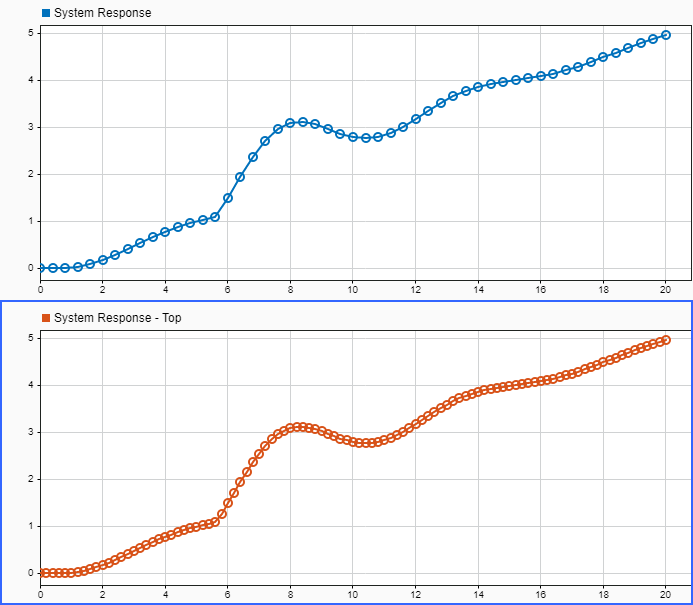
System Response 信号と System Response - Top 信号は同じ信号ですが、異なる場所にログが記録されます。System Response 信号は、ローカル ソルバーのステップ サイズによって決定されるレートで参照モデル内にログが記録されます。System Response - Top 信号は、最上位ソルバーのステップ サイズによって決定されるレートで、最上位モデルの Outport ブロックによってログが記録されます。ローカル ソルバーのステップ サイズが親ソルバーのステップ サイズよりも大きいため、System Response 信号についてログに記録されるデータ点の数が少なくなります。
拡張例

モデル参照を使用したコンポーネントベースのモデル化
別のモデルを複数回参照するモデルのシミュレーションとコード生成について詳しく説明する。

サブシステムから参照モデルへの変換
この例では、モデル参照変換アドバイザーまたは Simulink.SubSystem.convertToModelReference 関数を使用して、サブシステムを参照モデルに変換する方法を説明します。包括的な手順については、サブシステムから参照モデルへの変換を参照してください。

ファイルのモデル コンポーネントの再利用
コンポーネントを個別のサブシステム ファイルやモデル ファイルに保存。

Improve Simulation Performance by Using Local Solvers
Improve simulation performance by using a local solver for a component with much faster dynamics compared to the rest of the system.
端子
入力
出力
コントロール
条件付き実行
イネーブル端子は、Model ブロックの上部に表示されます。端子ラベルは、イネーブル信号を表すアイコンです。

端子に接続している制御信号によって、参照モデルを実行するタイミングが決定します。詳細については、参照モデルの条件付き実行を参照してください。
依存関係
この端子を有効にするには Enable ブロックを参照モデルの最上位に追加します。
データ型: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | Boolean | fixed point
トリガー端子は Model ブロックの上部に表示されます。端子ラベルは、トリガー信号を表すアイコンです。

端子に接続している制御信号によって、参照モデルを実行するタイミングが決定します。詳細については、参照モデルの条件付き実行を参照してください。
依存関係
この端子を有効にするには Trigger ブロックを参照モデルの最上位に追加し、その [トリガー タイプ] を [立ち上がり]、[立ち下がり]、または [両方] に設定します。
データ型: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | Boolean | fixed point
関数呼び出し端子は、Model ブロックの上部に表示されます。端子ラベルには、参照モデルの名前が関数として表示されます。

端子に接続している関数呼び出し制御信号によって、参照モデルを実行するタイミングが決定します。詳細については、参照モデルの条件付き実行を参照してください。
依存関係
この端子を有効にするには Trigger ブロックを参照モデルの最上位に追加し、その [トリガー タイプ] を [関数呼び出し] に設定します。
モデル イベントのシミュレーション
初期化イベント端子は、モデルの初期化イベントをトリガーする関数呼び出し制御信号を提供します。これにより、参照モデルの状態が初期化されます。
参照モデルには、モデルの初期化イベントに対応する Initialize Function ブロックを含めることができます。詳細については、初期化関数、再初期化関数、リセット関数および終了関数の使用を参照してください。
依存関係
この端子を有効にするには、[モデル初期化端子を表示] を選択します。
リセット イベント端子は、モデル リセット イベントをトリガーする関数呼び出し制御信号を提供します。これにより、参照モデルの状態がリセットされます。
参照モデルには、各モデル リセット イベントに対応する Reset Function ブロックが含まれていなければなりません。詳細については、初期化関数、再初期化関数、リセット関数および終了関数の使用を参照してください。
端子名を指定するには、Reset Function ブロック内の Event Listener ブロックの [イベント名] パラメーターを使用します。
依存関係
このタイプの端子を有効にするには、[モデル リセット端子を表示] を選択します。
再初期化イベント端子は、モデルの再初期化イベントをトリガーする関数呼び出し制御信号を提供します。これにより、参照モデルの状態が再初期化されます。
参照モデルには、各モデル再初期化イベントに対応する Reinitialize Function ブロックが含まれていなければなりません。詳細については、初期化関数、再初期化関数、リセット関数および終了関数の使用を参照してください。
端子名を指定するには、Reinitialize Function ブロック内の Event Listener ブロックの [イベント名] パラメーターを使用します。
依存関係
このタイプの端子を有効にするには、"モデル再初期化端子を表示" を選択します。
終了イベント端子は、モデル終了イベントをトリガーする関数呼び出し制御信号を提供します。これにより、参照モデルの状態が読み取られ、保存されます。
参照モデルには、モデル終了イベントに対応する Terminate Function ブロックを含めることができます。詳細については、初期化関数、再初期化関数、リセット関数および終了関数の使用を参照してください。
依存関係
この端子を有効にするには、[モデル終了端子を表示] を選択します。
周期的イベント端子は、モデルを実行するタイミングを指定する関数呼び出し制御信号を提供します。例については、Function-Call Generator を使用したレートベース モデルのシミュレーションのテストを参照してください。
各端子ラベルは、対応する Inport ブロックのサンプル時間など、周期的イベントに関する情報を表示します。たとえば、次の図の Model ブロックは、周期的イベント端子を表示し、次の 2 つの離散レートをもつモデルを参照します。0.01 と 0.1。
![A Model block has ports labeled D1[0.01] and D2[0.1].](model-block-periodic-event-ports.png)
依存関係
このタイプの端子を有効にするには、[次を使用してレートをスケジュール] を [端子] に設定します。
パラメーター
ブロックの特性
ヒント
Model ブロックが保護モデルを参照するかどうかをプログラムにより判別するには、関数 get_param を使用して、Model ブロックの読み取り専用 ProtectedModel パラメーターをクエリします。参照モデルが保護されている場合、関数は "on" を返します。参照モデルが保護されていない場合、関数は "off" を返します。