Enable
イネーブル端子をサブシステムまたはモデルに追加
ライブラリ:
Simulink /
Ports & Subsystems
HDL Coder /
Ports & Subsystems
説明
Enable ブロックでは、外部信号でサブシステムまたはモデルの実行を制御できます。この機能を有効にするには、ブロックを Subsystem ブロックに追加するか、Model ブロックで参照されるモデルのルート レベルに追加します。
モデルのルート レベルでイネーブル端子を使用する場合は、次のようにします。
マルチ レート モデルでは、ソルバーをシングルタスクに設定します。
固定ステップ サイズをもつモデルでは、そのモデル内で少なくとも 1 つのブロックは指定した固定ステップ サイズのレートで実行しなければなりません。
例
Enabled Subsystem を使用した制御アルゴリズムの実装
この例では、Enabled Subsystem を使用してバイナリ論理信号に基づく制御アルゴリズムを実装する方法を示します。Enabled Subsystem は、バイナリ信号が正の値であり制御アルゴリズムを実装する場合に実行されます。この例では、スーパーツイスティング制御アルゴリズムを使用して、不安定な動的システムを安定させます。スーパーツイスティング アルゴリズムは、ロバスト性能でよく知られているスライディング モード制御手法の 1 つです。

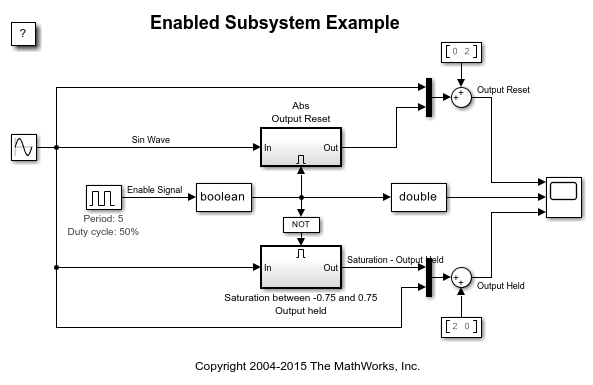
Enabled Subsystem のブロック状態と出力の制御
この例では、Enabled Subsystem ブロック内のブロックの状態を、Subsystem が無効化されたときにリセットまたは保持する方法と、Subsystem の出力を制御する方法を示します。この例では、離散制御信号と連続制御信号の両方について、状態と出力値の構成の 4 つの異なる組み合わせを見ていきます。Enabled Subsystem が無効化されたとき、次のような組み合わせが使用可能です。
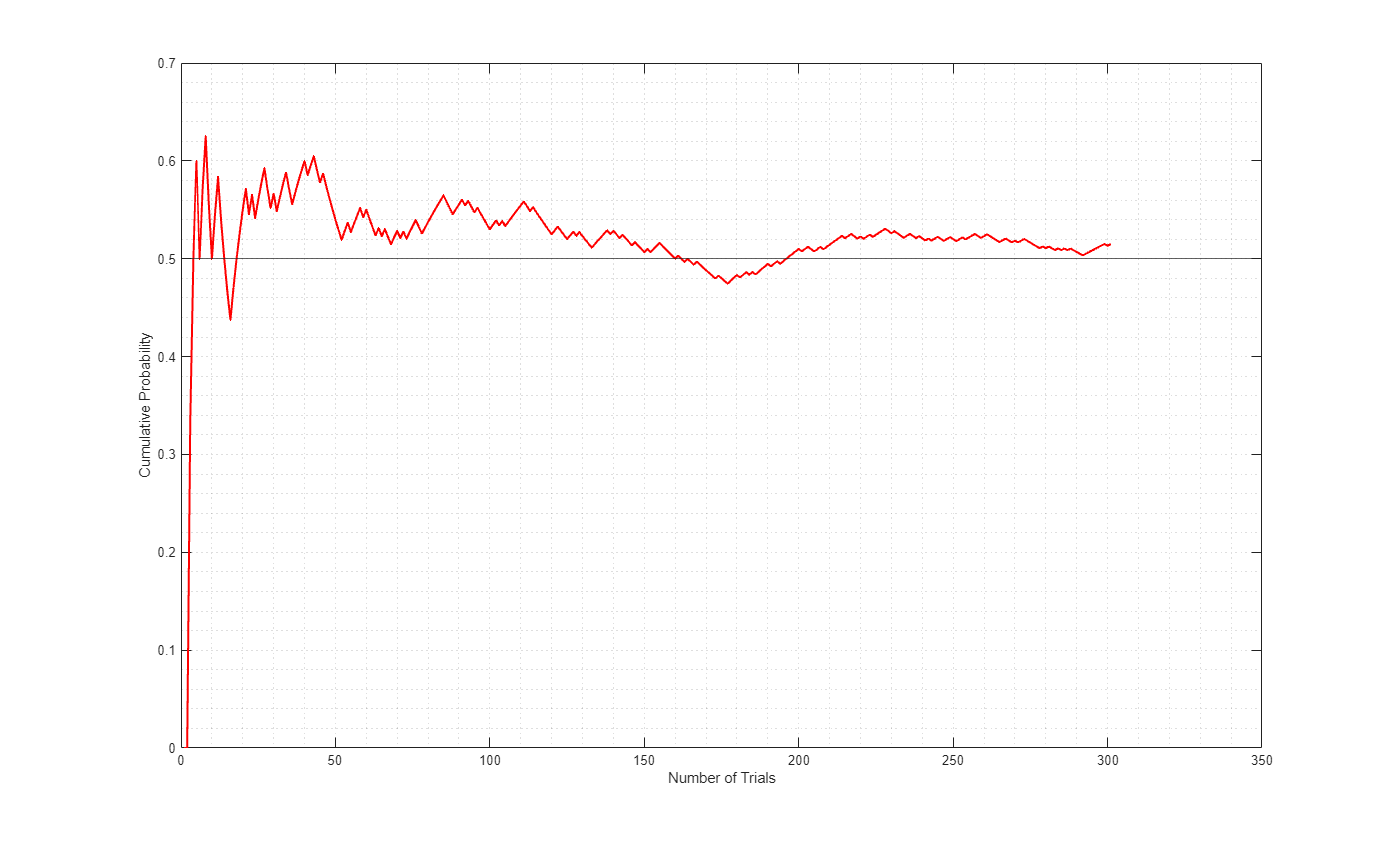
MATLAB System ブロックを使用した大数の法則の確認
この例では、MATLAB Systemブロックを使用して Simulink で大数の法則を説明する方法を示します。

条件付き実行サブシステムを使ったカウンター
この例では、Enabled Subsystem および Triggered Subsystem を使用してカウンターを実装する方法を示します。この例では、モデル sldemo_counters がタンクへの水の流れを制御し、オーバーフローの発生回数をカウンターでカウントします。タンクの水位が 30 秒以上にわたって 8 メートル以上になるとオーバーフローが発生します。

クラッチ ロックアップ モデルの作成
この例では、Simulink® を使用して回転クラッチ システムをモデル化およびシミュレーションする方法を示します。ロックアップ時にシステム ダイナミクスにおいてトポロジーが変化するため、クラッチ システムのモデル化は困難ですが、この例題では、Enabled Subsystem がこのような問題をいかに簡単に処理できるかを示します。クラッチ シミュレーションの作成において重要な Simulink モデル化概念を採用する方法を説明します。設計者は、動的に変化する可能性がある強い不連続性と制約を伴う多くのモデルにこうした概念を適用できます。
端子
出力
パラメーター
ブロックの特性
データ型 |
|
直達 |
|
多次元信号 |
|
可変サイズの信号 |
|
ゼロクロッシング検出 |
|
拡張機能
バージョン履歴
R2006a より前に導入