このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
Simulink.SubSystem.convertToModelReference
サブシステムからモデルへの変換
構文
説明
Simulink.SubSystem.convertToModelReference( は、blk,UseConversionAdvisor=true)blk で指定されたサブシステムに対してモデル参照変換アドバイザーを開きます。
この関数を使用する前に、サブシステムを含むモデルを読み込みます。
[ は、t,h] = Simulink.SubSystem.convertToModelReference(blks,mdls)blks で指定された 1 つ以上のサブシステムを、mdls で指定された名前のモデルに変換します。
関数が変換するサブシステムごとに、関数は以下を行います。
モデルを作成する。
サブシステムの内容を新しいモデルにコピーする。
元のサブシステムからのコンパイルされた属性を使用するように、新しいモデルのルートレベルの入力ブロックと出力ブロックを更新する。
親モデルのコンフィギュレーション セットを新しいモデルにコピーするか、親モデルと同じコンフィギュレーション セットを参照する。変換によって新しいモデルの一部の構成設定を変更して、新しいモデルを参照モデルとして使用できるようにすることができます。
該当する場合、関数は以下も行います。
サブシステムによって使用されるモデル ワークスペースの内容を親モデルから新しいモデルにコピーする。
親モデルで使用されるデータ ディクショナリを新しいモデルに適用する。
新しいモデルに必要な
Simulink.Busオブジェクト、Simulink.Signalオブジェクト、および調整可能なパラメーターを作成する。元の Subsystem ブロックのブロック マスクに基づいて、新しいモデルのシステム マスクを作成する。システム マスクは、マスク初期化コードなどのブロック マスクの一部の機能をサポートしていません。詳細については、システム マスクの概要を参照してください。
Requirements Toolbox™ ソフトウェアで作成された要件リンクを、元の Subsystem ブロックから新しい Model ブロックにコピーする。
例
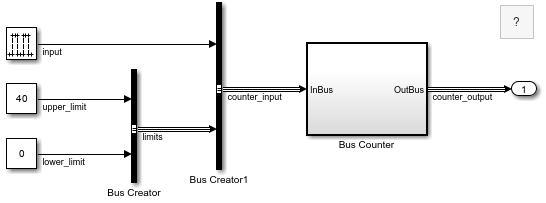
sldemo_mdlref_conversion という名前のモデルを開いてコンパイルします。変換を成功させるには、サブシステムを含むモデルが正常にコンパイルされる必要があります。
mdl = "sldemo_mdlref_conversion"; open_system(mdl); set_param(mdl,SimulationCommand="Update")

モデルは警告やエラーなしでコンパイルされます。
Bus Counter という名前の Subsystem ブロックに対して、モデル参照変換アドバイザーを開きます。
blk = "sldemo_mdlref_conversion/Bus Counter"; Simulink.SubSystem.convertToModelReference(blk,... UseConversionAdvisor=true);
Updating Model Advisor cache... Model Advisor cache updated. For new customizations, to update the cache, use the Advisor.Manager.refresh_customizations method.
モデル参照変換アドバイザーが開きます。
sldemo_mdlref_conversion という名前のモデルを開いてコンパイルします。変換を成功させるには、サブシステムを含むモデルが正常にコンパイルされる必要があります。
mdl = "sldemo_mdlref_conversion"; open_system(mdl); set_param(mdl,SimulationCommand="Update")
モデルは警告やエラーなしでコンパイルされます。
Bus Counter という名前の Subsystem ブロックに対して、モデル参照変換アドバイザーを開きます。
blk = "sldemo_mdlref_conversion/Bus Counter"; newmdl = "BusCounter"; Simulink.SubSystem.convertToModelReference(blk,newmdl);
### Successfully converted Subsystem block to Model block.
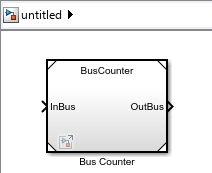
既定では、この関数は Subsystem ブロックを Model ブロックに置き換えません。代わりに、この関数は、新しいモデルを参照する Model ブロックを含む新しいウィンドウを開きます。
sldemo_mdlref_conversion という名前のモデル例を開いてコンパイルします。変換を成功させるには、サブシステムを含むモデルが正常にコンパイルされる必要があります。
mdl = "sldemo_mdlref_conversion"; open_system(mdl) set_param(mdl,SimulationCommand="Update")

モデルは警告やエラーなしでコンパイルされます。
以下のオプションを指定し、Bus Counter という名前の Subsystem ブロックの内容を BusCounter という名前の参照モデルに変換します。
できる限り問題を自動的に修正する。
新しいモデルを参照する Model ブロックによって Subsystem ブロックを置き換える。
変換前後のシミュレーション結果をチェックする。
subsys = "sldemo_mdlref_conversion/Bus Counter"; newmdl = "BusCounter"; Simulink.SubSystem.convertToModelReference(subsys,newmdl,... AutoFix=true,ReplaceSubsystem=true,CheckSimulationResults=true);
### Successfully converted Subsystem block to Model block.
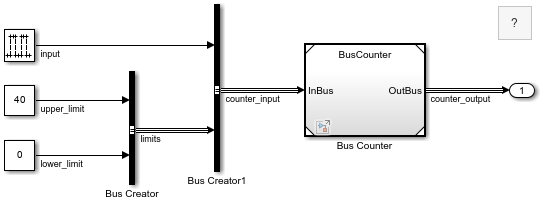
Subsystem ブロックが、BusCounter という名前のモデルを参照する Model ブロックによって置き換えられます。
関数 Simulink.SubSystem.convertToModelReference を 1 回呼び出して、複数のサブシステムを参照モデルに変換できます。
f14 という名前のモデルを開いてコンパイルします。変換を成功させるには、サブシステムを含むモデルが正常にコンパイルされる必要があります。
mdl = "f14"; open_system(mdl) set_param(mdl,SimulationCommand="Update")
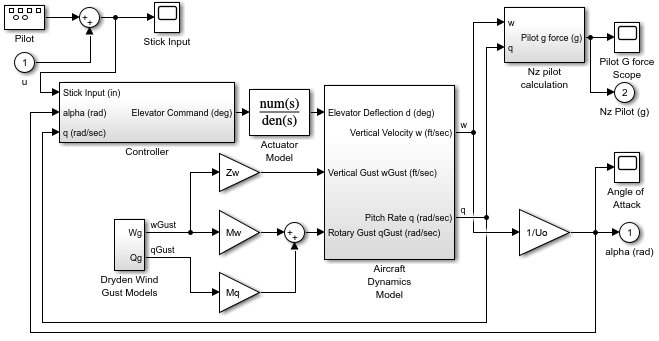
モデルは警告やエラーなしでコンパイルされます。
変換するモデルを準備して、変換中に特定される問題を排除するか、問題の数を減らします。
変換前後のシミュレーション結果が同等であることをチェックできるように、Dataset 形式を使用してモデルの出力をログに記録します。
set_param(mdl,SaveOutput="on",SaveFormat="Dataset")
新しい参照モデルは、そのコンフィギュレーション パラメーター設定を親モデルから継承します。信号の関連付けの推奨設定を使用するように f14 モデルを更新します。この設定では、Simulink.Signal オブジェクトに対して明示的に指定された信号の関連付けのみがサポートされます。
set_param(mdl,SignalResolutionControl="UseLocalSettings")以下のオプションを指定し、Controller および Aircraft Dynamics Model という名前の Subsystem ブロックの内容を参照モデルに変換します。
問題を自動的に修正する。
新しいモデルを参照する Model ブロックによって Subsystem ブロックを置き換える。
変換前後のシミュレーション結果をチェックする。
ss1 = "f14/Controller"; ss2 = "f14/Aircraft Dynamics Model"; mdl1 = "Controller"; mdl2 = "AircraftDynamics"; Simulink.SubSystem.convertToModelReference([ss1 ss2],[mdl1 mdl2],... AutoFix=true,ReplaceSubsystem=true,CheckSimulationResults=true)
### Successfully converted Subsystem block to Model block.
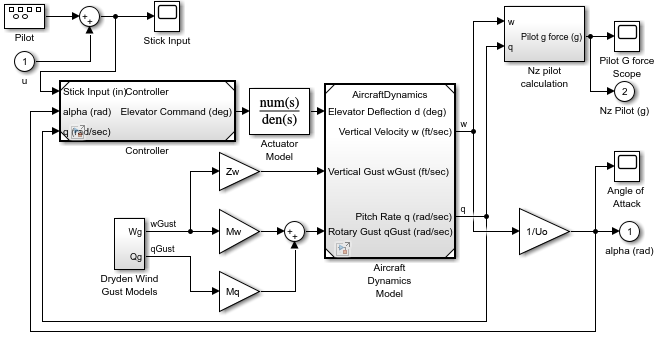
Controller および Aircraft Dynamics Model という名前の Subsystem ブロックが、それぞれ Controller および AircraftDynamics という名前のモデルを参照する Model ブロックによって置き換えられます。