モデル参照変換アドバイザー
サブシステムから参照モデルへの変換
説明
モデル参照変換アドバイザーは、サブシステムを参照モデルに変換します。このアドバイザーは、条件付きサブシステム、マスク サブシステム、参照サブシステムなど、さまざまなサブシステムを変換できます。
サブシステムを参照モデルに変換することは、大規模で複雑なシステムのモデル化やチームベースの開発にとって有益です。多くの大規模モデルでは、サブシステムと参照モデルを組み合わせて使用します。サブシステムを参照モデルに変換するかどうかを決定するには、Simulink コンポーネントのタイプの検討を参照してください。
変換で問題が発生すると、モデル参照変換アドバイザーを使って問題を確認および修正できます。Subsystem ブロックの内容を準備すると、問題がなくなるか、問題の数が削減されます。このような問題はモデル編集環境で解決する方が、モデル参照変換アドバイザーと Simulink® エディターの間を何度も切り替えるよりも効率的です。詳細については、サブシステムから参照モデルへの変換を参照してください。
モデル参照変換アドバイザー を開く
Simulink エディター: Subsystem ブロックを選択します。次に、Simulink ツールストリップの [Subsystem ブロック] タブで、[変換] 、 [参照モデル] を選択します。
MATLAB® コマンド ウィンドウ:
UseConversionAdvisorをtrueに設定してSimulink.SubSystem.convertToModelReference関数を使用します。
例
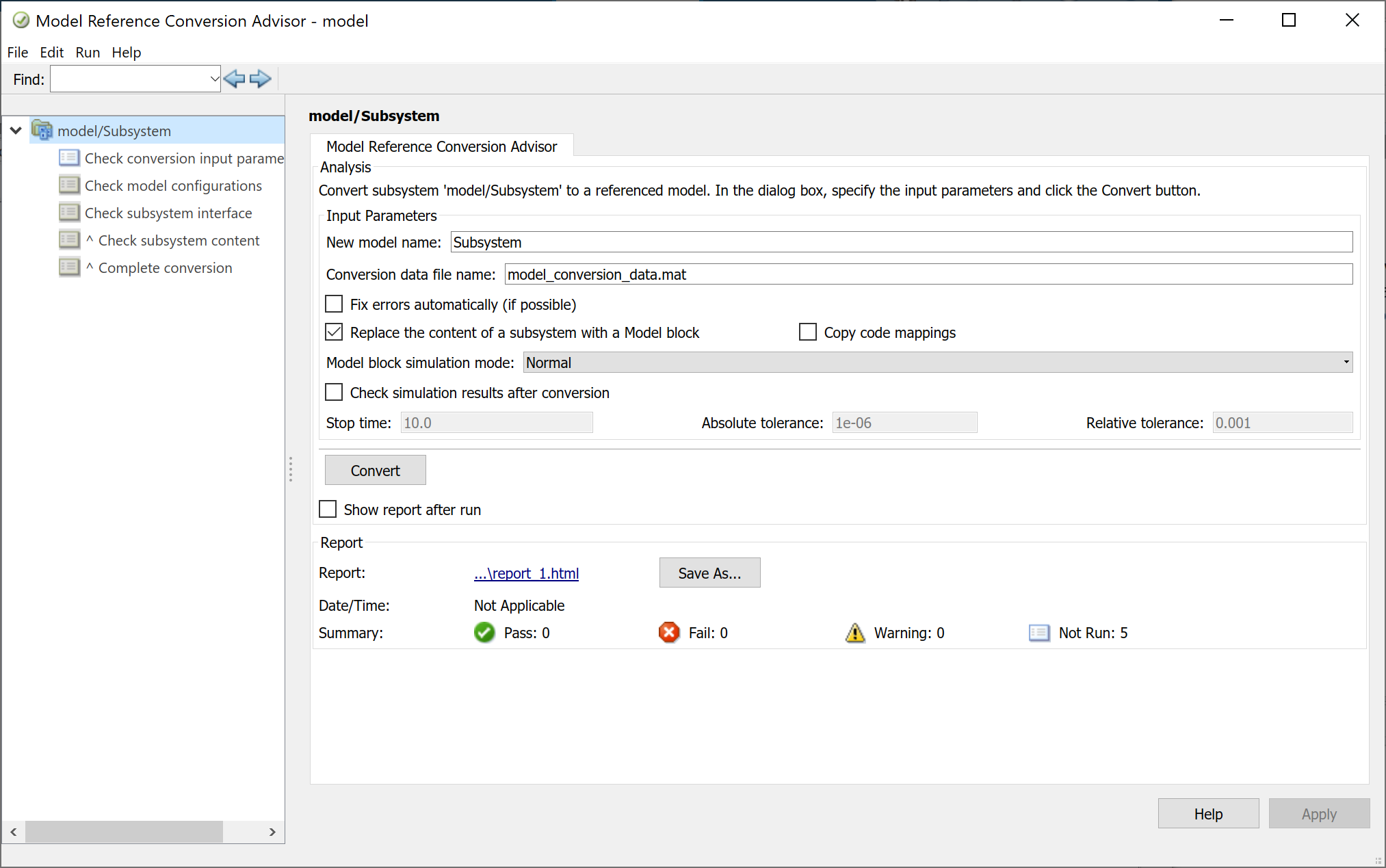
変換の出力を決定し、アドバイザーが変換エラーの修正を自動的に試みるかどうかを制御する入力パラメーターを指定します。
アドバイザーを開くときに、左側のペインで、最上位ノードが選択されています。このノードによって、アドバイザーが参照モデルに変換する Subsystem ブロックが特定され、変換入力パラメーターが提供されます。既定のパラメーター値を使用するか、あるいは値を変更して変換をカスタマイズすることができます。
特定のパラメーターの詳細については、パラメーターを参照してください。
モデル参照変換アドバイザーでは、各チェックを自動的にステップ実行できます。
サブシステムの変換オプションの設定後、[変換] をクリックします。
モデル参照変換アドバイザーが各チェックを自動的にステップ実行します。
アドバイザーから報告された問題を解決します。アドバイザーでは、自動で修正できるすべての問題に [修正] ボタンが表示されます。
報告された問題を解決したら、[続行] をクリックします。
モデル参照変換アドバイザーがすべてのチェックを正常に実行したら、変換を完了します。
すべての変換入力パラメーターが有効であることを確認します。
特定のパラメーターの詳細については、パラメーターを参照してください。
左側のペインで [変換の入力パラメーターをチェック] ノードを選択します。
[このタスクを実行] ボタンをクリックします。
アドバイザーから報告された問題を解決します。アドバイザーでは、自動で修正できるすべての問題に [修正] ボタンが表示されます。
報告された問題を解決したら、[続行] をクリックします。
モデル コンフィギュレーションがモデル参照の要件を満たしていることを検証します。このチェックは、モデル参照で有効でないモデル コンフィギュレーション パラメーター設定を特定します。
左側のペインで [モデル コンフィギュレーションをチェック] ノードを選択します。
[このタスクを実行] ボタンをクリックします。
アドバイザーから報告された問題を解決します。アドバイザーでは、自動で修正できるすべての問題に [修正] ボタンが表示されます。
報告された問題を解決したら、[続行] をクリックします。
サブシステム インターフェイスがモデルの参照要件を満たしているかどうかを検証します。
左側のペインで [サブシステムのインターフェイスをチェック] ノードを選択します。
[このタスクを実行] ボタンをクリックします。
アドバイザーは、サブシステムのタイプがアドバイザーが変換できるタイプであることを検証します。次にアドバイザーは、マスク サブシステムなどの特定のタイプのサブシステムへのインターフェイスが変換の要件を満たしていることを検証します。
アドバイザーから報告された問題を解決します。アドバイザーでは、自動で修正できるすべての問題に [修正] ボタンが表示されます。
報告された問題を解決したら、[続行] をクリックします。
サブシステムの内容がモデル参照の要件を満たしているかどうかを検証します。
左側のペインで [サブシステムのコンテンツをチェック] ノードを選択します。
[このタスクを実行] ボタンをクリックします。
アドバイザーはモデルが正常にコンパイルするかどうかを確認します。コンパイルが正常に行われると、アドバイザーはサブシステム内のブロックが変換の要件を満たしているかどうかチェックします。
アドバイザーから報告された問題を解決します。アドバイザーでは、自動で修正できるすべての問題に [修正] ボタンが表示されます。
報告された問題を解決したら、[続行] をクリックします。
すべてのチェックが正常に実行されたら、変換が完了します。
左側のペインで [変換を完了] ノードを選択します。
[このタスクを実行] ボタンをクリックします。
モデル参照変換アドバイザーは以下を行います。
モデルを作成する。
サブシステムの内容を新しいモデルにコピーする。
既定では、Subsystem ブロックを、新しいモデルを参照する Model ブロックに置き換えようとする。
元のサブシステムからのコンパイルされた属性を使用するように、新しいモデルのルートレベルの入力ブロックと出力ブロックを更新する。
親モデルのコンフィギュレーション セットを新しいモデルにコピーするか、親モデルと同じコンフィギュレーション セットを参照する。新しいモデルを参照モデルとして使用できるようにするために、変換時に、参照されるコンフィギュレーション セット内の互換性のないパラメーター値がオーバーライドされる (R2026a 以降)か、コピーされるコンフィギュレーション セット内の互換性のないパラメーター値が変更されます。
slprjフォルダーに HTML 変換概要レポートが作成されます。このレポートには、アドバイザーが実行した修正結果を含む、変換プロセスの結果がまとめられています。このレポートでは、アドバイザーがコピーする要素についても説明しています。オプションで、変換前後のシミュレーション結果の整合性をチェックする。
該当する場合、モデル参照変換アドバイザーは以下も行います。
サブシステムによって使用されるモデル ワークスペースの内容を親モデルから新しいモデルにコピーする。
親モデルで使用されるデータ ディクショナリを新しいモデルに適用する。
新しいモデルに必要な
Simulink.Busオブジェクト、Simulink.Signalオブジェクト、および調整可能なパラメーターを作成する。元の Subsystem ブロックのブロック マスクに基づいて、新しいモデルのシステム マスクを作成する。システム マスクは、マスク初期化コードなどのブロック マスクの一部の機能をサポートしていません。詳細については、システム マスクの概要を参照してください。
Requirements Toolbox™ ソフトウェアで作成された要件リンクを、元の Subsystem ブロックから新しい Model ブロックにコピーする。
変換結果に満足しない場合、モデルを初期の状態に戻すことができます。[変換を完了] チェックを正常に実行した後に、[元のモデルを復元] をクリックします。
[変換後にシミュレーション結果をチェック] を選択した場合、[比較結果を表示するにはここをクリック] リンクをクリックして結果を表示できます。
[変換後にシミュレーション結果をチェック] を選択した場合、モデル参照変換アドバイザーは変換前後の最上位モデルのシミュレーション結果の比較を提供します。
[変換を完了] チェックを正常に実行した後に、[比較結果を表示するにはここをクリック] をクリックします。結果がシミュレーション データ インスペクターに表示されます。緑色のチェック マークは、シミュレーション結果がベースライン モデルと新しい参照モデルを含むモデル間の許容誤差内にあることを示します。

詳細については、シミュレーション データの比較を参照してください。
関連する例
パラメーター
プログラムでの使用
制限
モデル参照変換アドバイザーは、いくつかの種類のサブシステムで変換をサポートしません。以下に例を示します。
サブシステム境界を越える Simscape™ Multibody™ コンポーネントのある Subsystem ブロック
非同期サブシステム — 非同期サブシステムを非同期関数呼び出しを受け入れる参照モデルに変換するには、非同期サポートの確認事項 (Simulink Coder)を参照してください。
ヒント
1 つ以上のサブシステムをモデルに変換するには、Simulink.SubSystem.convertToModelReference 関数を使用します。変換概要レポートを生成するには、モデル参照変換アドバイザーを使用します。
次の表に、モデル参照変換アドバイザーのパラメーターと、対応する Simulink.SubSystem.convertToModelReference 関数の引数とのマッピングを示します。
| ツールのパラメーター | 関数の引数 |
|---|---|
| 新規モデル名 | 1 つ以上のモデル名を指定するには、関数の 2 番目の入力引数を使用します。 |
| 変換データ ファイル名 | DataFileName |
| 自動的にエラーを修正 (可能な場合) | AutoFix |
| サブシステムの内容を Model ブロックに置換 | ReplaceSubsystem |
| コード マッピングをコピー | CopyCodeMappings |
| Model ブロック シミュレーション モード | SimulationModes |
| 変換後にシミュレーション結果をチェック | CheckSimulationResults |
| 終了時間 | StopTime |
| 絶対許容誤差 | AbsoluteTolerance |
| 相対許容誤差 | RelativeTolerance |