importNetworkFromPyTorch
説明
Add-On Required: この機能にはが必要です。
net = importNetworkFromPyTorch(modelfile)modelfile からインポートします。PyTorch モデルは、エクスポートされたプログラムまたはトレースされたモデルでなければなりません。エクスポートされたプログラム モデルは、より多くの Deep Learning Toolbox™ の組み込み層をもつモデルであるため、推奨されます。
モデルをインポート用に準備するために、PyTorch version 2.8 を使用してモデルをエクスポートすることを試みてください。モデルをエクスポートできない場合は、トレースします。詳細については、ヒントを参照してください。次のコードは、PyTorch モデルをインポート用に準備するために必要な手順の概要を示します。
# Ensure the layers are set to inference mode.
model.eval()
# Move the model to the CPU.
model.to("cpu")
# Generate input data.
X = torch.rand(1,3,224,224)
# For ExportedProgram models
# Export the model and save it in PyTorch version 2.8.
exported_model = torch.export.export(model, (X,))
torch.export.save(exported_model, 'myModel.pt2')
# For traced models
# Trace the model and save it.
traced_model = torch.jit.trace(model.forward, X)
traced_model.save('myModel.pt')
ヒント
ディープ ネットワーク デザイナーを使用して PyTorch モデルを対話形式でインポートします。インポート時に、アプリは注意が必要な問題の詳細を含むインポート レポートを表示します。詳細については、外部のプラットフォームからのネットワークのインポートを参照してください。
net = importNetworkFromPyTorch(modelfile,Name=Value)Namespace="CustomLayers" は、生成されたカスタム層と関連する関数を現在のフォルダーの +CustomLayers 名前空間に保存します。
ヒント
トレースされたモデルの場合、名前と値の引数 PyTorchInputSizes が指定されていると、この関数はより多くの Deep Learning Toolbox の組み込み層を返すことがあります。
例
事前学習済みかつトレース済みの PyTorch モデルを、初期化されていない dlnetwork オブジェクトとしてインポートします。次に、インポートしたネットワークに入力層を追加します。
この例では、MNASNet (Copyright© Soumith Chintala 2016) PyTorch モデルをインポートします。MNASNet は、ImageNet データベースのイメージを使って学習させるイメージ分類モデルです。MathWorks の Web サイトから、mnasnet1_0 ファイルをダウンロードします。ファイルのサイズは約 17 MB です。
modelfile = matlab.internal.examples.downloadSupportFile("nnet", ... "data/PyTorchModels/mnasnet1_0.pt");
importNetworkFromPyTorch 関数を使用して MNASNet モデルをインポートします。この関数は、入力層がなく初期化されていない dlnetwork オブジェクトとしてモデルをインポートします。ソフトウェアは、入力層の数、追加する入力層のタイプ、および入力層の追加方法に関する情報を含む警告を表示します。
net = importNetworkFromPyTorch(modelfile)
Warning: Network was imported as an uninitialized dlnetwork. Before using the network, add input layer(s): % Create imageInputLayer for the network input at index 1: inputLayer1 = imageInputLayer(<inputSize1>, Normalization="none"); % Add input layers to the network and initialize: net = addInputLayer(net, inputLayer1, Initialize=true);
net =
dlnetwork with properties:
Layers: [3×1 nnet.cnn.layer.Layer]
Connections: [2×2 table]
Learnables: [210×3 table]
State: [104×3 table]
InputNames: {'TopLevelModule:layers'}
OutputNames: {'TopLevelModule:classifier'}
Initialized: 0
View summary with summary.
インポートしたネットワークの入力サイズを指定して、イメージ入力層を作成します。次に、インポートしたネットワークにイメージ入力層を追加し、addInputLayer関数を使用してネットワークを初期化します。
InputSize = [224 224 3];
inputLayer = imageInputLayer(InputSize,Normalization="none");
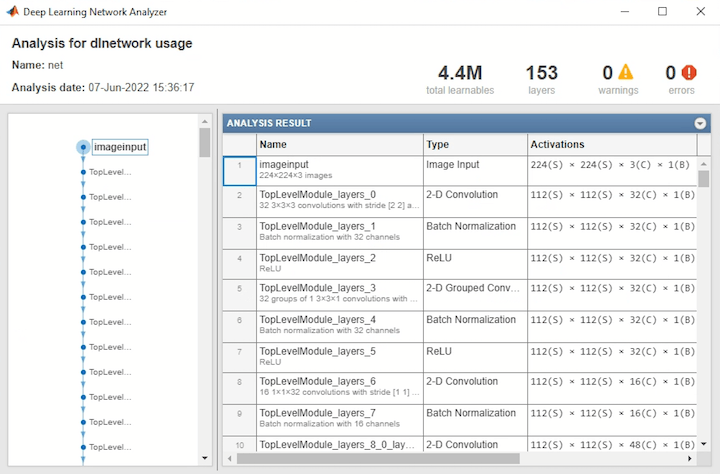
net = addInputLayer(net,inputLayer,Initialize=true);インポートしたネットワークを解析し、入力層を表示します。ネットワークは予測に使用する準備ができています。
analyzeNetwork(net)
名前と値の引数 PyTorchInputSizes を使用して、事前学習済みかつトレース済みの PyTorch モデルを初期化された dlnetwork オブジェクトとしてインポートします。
この例では、MNASNet (Copyright© Soumith Chintala 2016) PyTorch モデルをインポートします。MNASNet は、ImageNet データベースのイメージを使って学習させるイメージ分類モデルです。MathWorks の Web サイトから、mnasnet1_0.pt ファイルをダウンロードします。ファイルのサイズは約 17 MB です。
modelfile = matlab.internal.examples.downloadSupportFile("nnet", ... "data/PyTorchModels/mnasnet1_0.pt");
名前と値の引数 PyTorchInputSizes が指定された importNetworkFromPyTorch 関数を使用して、MNASNet モデルをインポートします。224x224 のカラー イメージがこの PyTorch モデルの有効な入力サイズであることがわかっています。ソフトウェアは、イメージのバッチに対して入力層を自動的に作成して追加します。これにより、1 行のコードでネットワークを初期化されたネットワークとしてインポートすることができます。
net = importNetworkFromPyTorch(modelfile,PyTorchInputSizes=[NaN,3,224,224])
net =
dlnetwork with properties:
Layers: [4×1 nnet.cnn.layer.Layer]
Connections: [3×2 table]
Learnables: [210×3 table]
State: [104×3 table]
InputNames: {'InputLayer1'}
OutputNames: {'TopLevelModule:classifier'}
Initialized: 1
View summary with summary.
ネットワークは予測に使用する準備ができています。
事前学習済みかつトレース済みの PyTorch モデルを、初期化されていない dlnetwork オブジェクトとしてインポートします。次に、インポートしたネットワークを初期化します。
この例では、MNASNet (Copyright© Soumith Chintala 2016) PyTorch モデルをインポートします。MNASNet は、ImageNet データベースのイメージを使って学習させるイメージ分類モデルです。MathWorks の Web サイトから、mnasnet1_0 ファイルをダウンロードします。ファイルのサイズは約 17 MB です。
modelfile = matlab.internal.examples.downloadSupportFile("nnet", ... "data/PyTorchModels/mnasnet1_0.pt");
importNetworkFromPyTorch 関数を使用して MNASNet モデルをインポートします。この関数は、初期化されていない dlnetwork オブジェクトとしてモデルをインポートします。
net = importNetworkFromPyTorch(modelfile)
Warning: Network was imported as an uninitialized dlnetwork. Before using the network, add input layer(s): % Create imageInputLayer for the network input at index 1: inputLayer1 = imageInputLayer(<inputSize1>, Normalization="none"); % Add input layers to the network and initialize: net = addInputLayer(net, inputLayer1, Initialize=true);
net =
dlnetwork with properties:
Layers: [3×1 nnet.cnn.layer.Layer]
Connections: [2×2 table]
Learnables: [210×3 table]
State: [104×3 table]
InputNames: {'TopLevelModule:layers'}
OutputNames: {'TopLevelModule:classifier'}
Initialized: 0
View summary with summary.
net は、入れ子ネットワークを含む単一のnetworkLayer層で構成される dlnetwork オブジェクトです。net の入力サイズを指定し、ネットワークへの入力を表すランダムな dlarray オブジェクトを作成します。dlarray オブジェクトのデータ形式は、2 次元イメージ入力を表す "SSCB" (空間、空間、チャネル、バッチ) の次元をもたなければなりません。詳細については、dlnetwork での予測のためのデータ形式を参照してください。
InputSize = [224 224 3];
X = dlarray(rand(InputSize),"SSCB");initialize関数を使用して、インポートしたネットワークの学習可能なパラメーターを初期化します。
net = initialize(net,X);
これで、インポートしたネットワークを予測に使用する準備が整いました。expandLayers関数を使用して networkLayer を展開し、インポートしたネットワークを解析します。
netExpanded = expandLayers(net)
netExpanded =
dlnetwork with properties:
Layers: [152×1 nnet.cnn.layer.Layer]
Connections: [161×2 table]
Learnables: [210×3 table]
State: [104×3 table]
InputNames: {'TopLevelModule:layers:0'}
OutputNames: {'TopLevelModule:classifier:1:ATEN12'}
Initialized: 1
View summary with summary.
analyzeNetwork(netExpanded)

事前学習済みかつトレース済みの PyTorch モデルを、初期化されていない dlnetwork オブジェクトとしてインポートし、イメージを分類します。
この例では、MNASNet (Copyright© Soumith Chintala 2016) PyTorch モデルをインポートします。MNASNet は、ImageNet データベースのイメージを使って学習させるイメージ分類モデルです。MathWorks の Web サイトから、mnasnet1_0 ファイルをダウンロードします。ファイルのサイズは約 17 MB です。
modelfile = matlab.internal.examples.downloadSupportFile("nnet", ... "data/PyTorchModels/mnasnet1_0.pt");
importNetworkFromPyTorch 関数を使用して MNASNet モデルをインポートします。この関数は、初期化されていない dlnetwork オブジェクトとしてモデルをインポートします。
net = importNetworkFromPyTorch(modelfile)
Warning: Network was imported as an uninitialized dlnetwork. Before using the network, add input layer(s): % Create imageInputLayer for the network input at index 1: inputLayer1 = imageInputLayer(<inputSize1>, Normalization="none"); % Add input layers to the network and initialize: net = addInputLayer(net, inputLayer1, Initialize=true);
net =
dlnetwork with properties:
Layers: [3×1 nnet.cnn.layer.Layer]
Connections: [2×2 table]
Learnables: [210×3 table]
State: [104×3 table]
InputNames: {'TopLevelModule:layers'}
OutputNames: {'TopLevelModule:classifier'}
Initialized: 0
View summary with summary.
インポートしたネットワークの入力サイズを指定して、イメージ入力層を作成します。次に、インポートしたネットワークにイメージ入力層を追加し、addInputLayer 関数を使用してネットワークを初期化します。
InputSize = [224 224 3];
inputLayer = imageInputLayer(InputSize,Normalization="none");
net = addInputLayer(net,inputLayer,Initialize=true);分類するイメージを読み取ります。
Im = imread("peppers.png");イメージのサイズをネットワークの入力サイズに変更します。イメージを表示します。
InputSize = [224 224 3]; Im = imresize(Im,InputSize(1:2)); imshow(Im)

MNASNet への入力には、さらなる前処理が必要です。イメージを再スケーリングします。次に、学習イメージの平均を減算し、学習イメージの標準偏差で除算して、イメージを正規化します。詳細については、入力データの前処理を参照してください。
Im = rescale(Im,0,1); meanIm = [0.485 0.456 0.406]; stdIm = [0.229 0.224 0.225]; Im = (Im - reshape(meanIm,[1 1 3]))./reshape(stdIm,[1 1 3]);
イメージをdlarrayオブジェクトに変換します。"SSCB" (空間、空間、チャネル、バッチ) の次元でイメージの形式を整えます。
Im_dlarray = dlarray(single(Im),"SSCB");同じく ImageNet のイメージで学習させた squeezenet から、クラス名を取得します。
[~,ClassNames] = imagePretrainedNetwork("squeezenet");イメージを分類し、予測されたラベルを見つけます。
prob = predict(net,Im_dlarray); [~,label_ind] = max(prob);
分類結果を表示します。
ClassNames(label_ind)
ans = "bell pepper"
事前学習済みかつトレース済みの PyTorch モデルを、初期化されていない dlnetwork オブジェクトとしてインポートします。次に、ソフトウェアによって生成されたカスタム層を見つけます。
この例では、findCustomLayers 補助関数を使用します。
この例では、MNASNet (Copyright© Soumith Chintala 2016) PyTorch モデルをインポートします。MNASNet は、ImageNet データベースのイメージを使って学習させるイメージ分類モデルです。MathWorks の Web サイトから、mnasnet1_0 ファイルをダウンロードします。ファイルのサイズは約 17 MB です。
modelfile = matlab.internal.examples.downloadSupportFile("nnet", ... "data/PyTorchModels/mnasnet1_0.pt");
importNetworkFromPyTorch 関数を使用して MNASNet モデルをインポートします。この関数は、初期化されていない dlnetwork オブジェクトとしてモデルをインポートします。
net = importNetworkFromPyTorch(modelfile)
Warning: Network was imported as an uninitialized dlnetwork. Before using the network, add input layer(s): % Create imageInputLayer for the network input at index 1: inputLayer1 = imageInputLayer(<inputSize1>, Normalization="none"); % Add input layers to the network and initialize: net = addInputLayer(net, inputLayer1, Initialize=true);
net =
dlnetwork with properties:
Layers: [3×1 nnet.cnn.layer.Layer]
Connections: [2×2 table]
Learnables: [210×3 table]
State: [104×3 table]
InputNames: {'TopLevelModule:layers'}
OutputNames: {'TopLevelModule:classifier'}
Initialized: 0
View summary with summary.
net は、入れ子ネットワークを含む単一のnetworkLayer層で構成される dlnetwork オブジェクトです。expandLayers関数を使用して、入れ子ネットワーク層を展開します。
net = expandLayers(net);
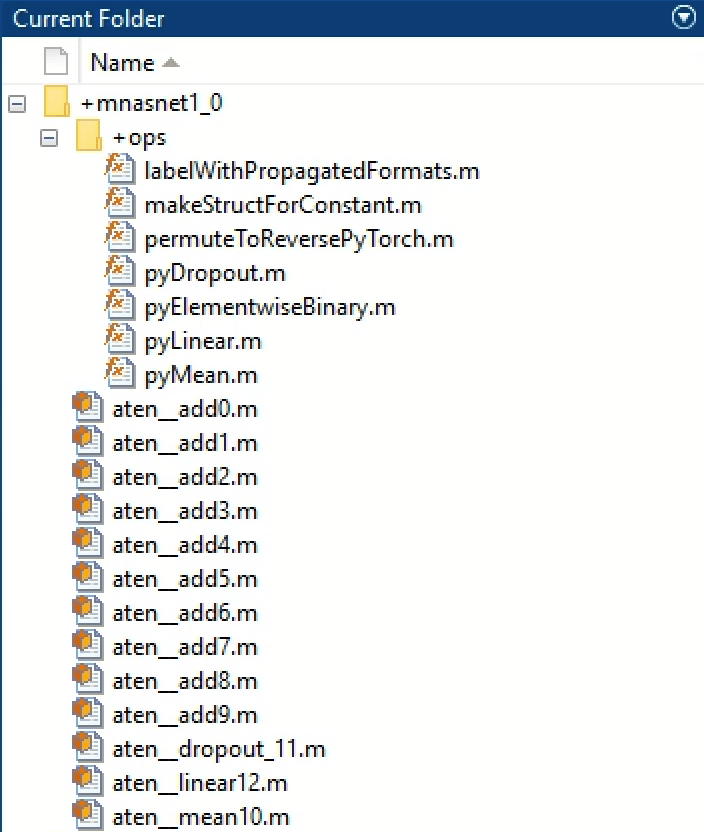
importNetworkFromPyTorch 関数は、MATLAB の組み込みの層または関数に変換できない PyTorch 層のカスタム層を生成します。詳細については、アルゴリズムを参照してください。ソフトウェアは、自動的に生成されたカスタム層を現在のフォルダーの +mnasnet1_0 名前空間に保存し、関連する関数を +ops 内部名前空間に保存します。カスタム層と関連する関数を確認するには、名前空間を調べます。
findCustomLayers 補助関数を使用して、生成されたカスタム層のインデックスを見つけることもできます。カスタム層を表示します。
ind = findCustomLayers(net.Layers,'+mnasnet1_0')ind = 1×2
150 152
net.Layers(ind)
ans =
2×1 Layer array with layers:
1 'TopLevelModule:ATEN14' Custom Layer mnasnet1_0.TopLevelModule_ATEN14
2 'TopLevelModule:classifier:1:ATEN12' Custom Layer mnasnet1_0.TopLevelModule_classifier_1_ATEN12
補助関数
findCustomLayers 補助関数は、importNetworkFromPyTorch によって自動的に生成されるカスタム層の indices に対応する logical ベクトルを返します。
function indices = findCustomLayers(layers,Namespace) s = what(['.' filesep Namespace]); indices = zeros(1,length(s.m)); for i = 1:length(layers) for j = 1:length(s.m) if strcmpi(class(layers(i)),[Namespace(2:end) '.' s.m{j}(1:end-2)]) indices(j) = i; end end end end
入力引数
名前と値の引数
出力引数
制限
importNetworkFromPyTorch関数は、PyTorch version 2.8 で作成されたエクスポート済みネットワークをサポートします。この関数は、他のバージョンの PyTorch で作成されたトレース済みネットワークをサポートできる場合があります。動的な形状でエクスポートされた
ExportedProgram形式のモデルのインポートはサポートされていません。
詳細
ヒント
PyTorch モデルをインポート用に準備するには、トレースではなく
torch.export.export()を使用したエクスポートが推奨されます。ExportedProgram形式は、モデルの計算グラフ、入力と出力の仕様、パラメーターを決定論的な構造で取り込む、フレームワーク非依存の安定したファイルを提供します。この形式により、ソフトウェアは、初期化され、より多くの MATLAB の組み込み層で構成されたモデルをインポートできます。トレースされたモデルをインポートする際に、PyTorch の層を MATLAB の組み込み層としてより適切にインポートできるようにするには、
PyTorchInputSizesを指定します。事前学習済みのネットワークを新しいイメージの予測または転移学習に使用するには、インポートしたモデルの学習に使用したイメージと同じようにイメージを前処理しなければなりません。最も一般的な前処理ステップは、イメージのサイズ変更、イメージの平均値の減算、イメージの BGR 形式から RGB 形式への変換です。
学習および予測用のイメージの前処理の詳細については、イメージの深層学習向け前処理を参照してください。
名前空間
+の親フォルダーが MATLAB パス上にない場合、この名前空間のメンバーにアクセスすることはできません。詳細については、名前空間と MATLAB パスを参照してください。NamespaceMATLAB は 1 ベースのインデックスを使用しますが、Python は 0 ベースのインデックスを使用します。つまり、配列の最初の要素のインデックスは、MATLAB と Python でそれぞれ 1 と 0 になります。MATLAB のインデックスの詳細については、配列インデックス付けを参照してください。MATLAB で、Python で作成されたインデックス (
ind) の配列を使用するには、配列をind+1に変換します。Python ライブラリの競合が発生した場合は、
pyenv関数を使用して、名前と値の引数ExecutionModeを"OutOfProcess"として指定します。その他のヒントについては、TensorFlow、PyTorch、および ONNX からモデルをインポートする際のヒントを参照してください。
アルゴリズム
importNetworkFromPyTorch 関数は、次の手順を順番に試し、PyTorch 層を MATLAB にインポートします。
関数は、PyTorch 層を組み込みの MATLAB 層としてインポートすることを試みます。詳細については、PyTorch 層の変換を参照してください。
関数は、PyTorch 層を組み込みの MATLAB 関数としてインポートすることを試みます。詳細については、PyTorch 層の変換を参照してください。
関数は、PyTorch 層をカスタム層としてインポートすることを試みます。
importNetworkFromPyTorchは、生成されたカスタム層および関連する関数を+名前空間に保存します。例については、PyTorch からのネットワークのインポートおよび生成されたカスタム層の検索を参照してください。Namespace関数は、プレースホルダー関数を含むカスタム層として PyTorch 層をインポートします。プレースホルダー関数は、ネットワークを使用する前に補完しなければなりません。プレースホルダー関数を参照してください。
最初の 3 つのケースでは、インポートされたネットワークは初期化後に予測の準備が整います。
代替機能
アプリ
ディープ ネットワーク デザイナーアプリを使用して、外部プラットフォームからネットワークをインポートすることもできます。アプリは importNetworkFromPyTorch 関数を使用してネットワークをインポートし、進行状況ダイアログ ボックスを表示します。インポート プロセス中に、アプリはネットワークに入力層を追加し (可能な場合)、注意が必要な問題の詳細を含むインポート レポートを表示します。ネットワークをインポートした後、ネットワークを対話的に編集、可視化、および解析できます。ネットワークの編集が完了したら、それを Simulink® にエクスポートするか、ネットワークを構築するための MATLAB コードを生成できます。
ブロック
PyTorch Model Predict ブロックを使用して PyTorch ネットワークを扱うこともできます。このブロックを使用すると、Python 関数を読み込んでデータを前処理および後処理したり、入力端子と出力端子を対話的に構成したりすることもできます。