BayesianOptimization
ベイズ最適化の結果
説明
BayesianOptimization オブジェクトは bayesopt 関数の出力であり、ベイズ最適化の結果が格納されます。さらに、このオブジェクトには、プロット関数または出力関数でアクセスできる bayesopt の各反復のデータも格納されます。
作成
BayesianOptimization オブジェクトの作成には bayesopt 関数を使用します。詳細については、ベイズ最適化を実行する方法を参照してください。
プロパティ
オブジェクト関数
bestPoint | 基準に従った、ベイズ最適化における最適点 |
plot | ベイズ最適化の結果のプロット |
predictConstraints | 一連の点における連結制約違反の予測 |
predictError | 一連の点における誤差値の予測 |
predictObjective | 一連の点における目的関数の予測 |
predictObjectiveEvaluationTime | 一連の点における目的関数の実行回数の予測 |
resume | ベイズ最適化の再開 |
例
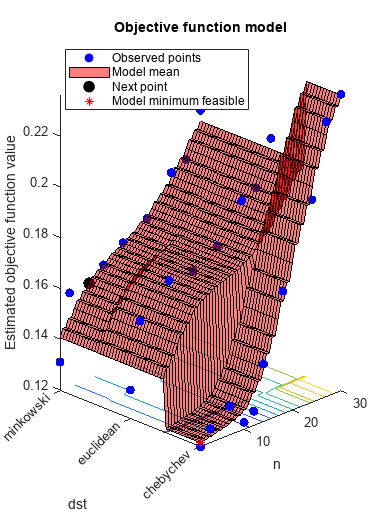
この例では、bayesopt を使用して交差検証損失を最小化することにより BayesianOptimization オブジェクトを作成する方法を示します。
ionosphere データに対し、KNN 分類器のハイパーパラメーターを最適化、つまり、交差検証損失が最小になる KNN のハイパーパラメーターを求めます。bayesopt で次のハイパーパラメーターに対する最小化を行います。
1 ~ 30 の最近傍サイズ。
距離関数
'chebychev'、'euclidean'および'minkowski'
再現性を得るため、乱数シードと分割を設定し、AcquisitionFunctionName オプションを 'expected-improvement-plus' に設定します。反復表示を非表示にするには 'Verbose' を 0 に設定します。このデータを組み込む無名関数として fun を作成して、区分 c と近似データ X および Y を目的関数 fun に渡します。関数のパラメーター化 を参照してください。
load ionosphere rng default num = optimizableVariable('n',[1,30],'Type','integer'); dst = optimizableVariable('dst',{'chebychev','euclidean','minkowski'},'Type','categorical'); c = cvpartition(351,'Kfold',5); fun = @(x)kfoldLoss(fitcknn(X,Y,'CVPartition',c,'NumNeighbors',x.n,... 'Distance',char(x.dst),'NSMethod','exhaustive')); results = bayesopt(fun,[num,dst],'Verbose',0,... 'AcquisitionFunctionName','expected-improvement-plus')
results =
BayesianOptimization with properties:
ObjectiveFcn: @(x)kfoldLoss(fitcknn(X,Y,'CVPartition',c,'NumNeighbors',x.n,'Distance',char(x.dst),'NSMethod','exhaustive'))
VariableDescriptions: [1×2 optimizableVariable]
Options: [1×1 struct]
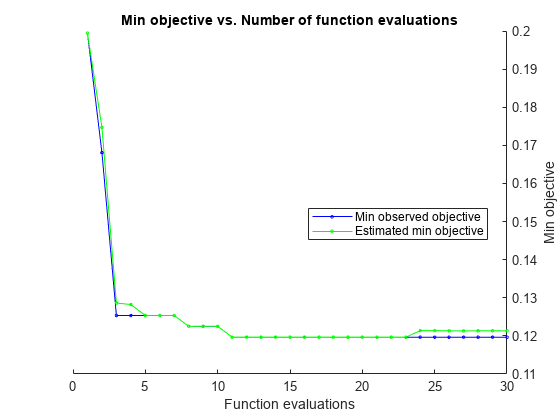
MinObjective: 0.1197
XAtMinObjective: [1×2 table]
MinEstimatedObjective: 0.1213
XAtMinEstimatedObjective: [1×2 table]
NumObjectiveEvaluations: 30
TotalElapsedTime: 30.3867
NextPoint: [1×2 table]
XTrace: [30×2 table]
ObjectiveTrace: [30×1 double]
ConstraintsTrace: []
UserDataTrace: {30×1 cell}
ObjectiveEvaluationTimeTrace: [30×1 double]
IterationTimeTrace: [30×1 double]
ErrorTrace: [30×1 double]
FeasibilityTrace: [30×1 logical]
FeasibilityProbabilityTrace: [30×1 double]
IndexOfMinimumTrace: [30×1 double]
ObjectiveMinimumTrace: [30×1 double]
EstimatedObjectiveMinimumTrace: [30×1 double]
バージョン履歴
R2016b で導入