ベイズ最適化のプロット関数
組み込みプロット関数
2 組の組み込みプロット関数があります。
| モデル プロット — D ≤ 2 の場合に適用 | 説明 |
|---|---|
@plotAcquisitionFunction | 獲得関数の表面をプロットします。 |
@plotConstraintModels | 各制約モデルの表面をプロットします。負の値は実行可能点を示します。 P (実行可能) 表面もプロットします。 存在する場合は Plotted error = 2*Probability(error) – 1. |
@plotObjectiveEvaluationTimeModel | 目的関数の評価時間モデルの表面をプロットします。 |
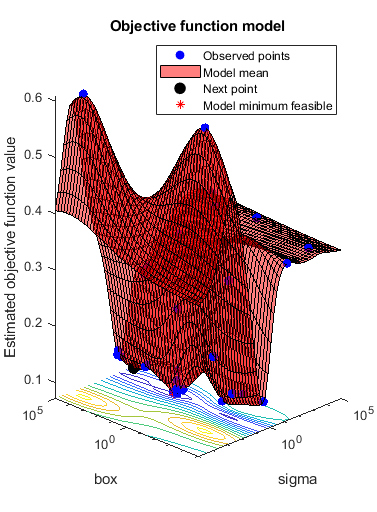
@plotObjectiveModel |
|
| トレース プロット — すべての D に適用 | 説明 |
|---|---|
@plotObjective | 観測された各関数値と関数評価の個数の関係をプロットします。 |
@plotObjectiveEvaluationTime | 観測された各関数評価の実行時間と関数評価の個数の関係をプロットします。 |
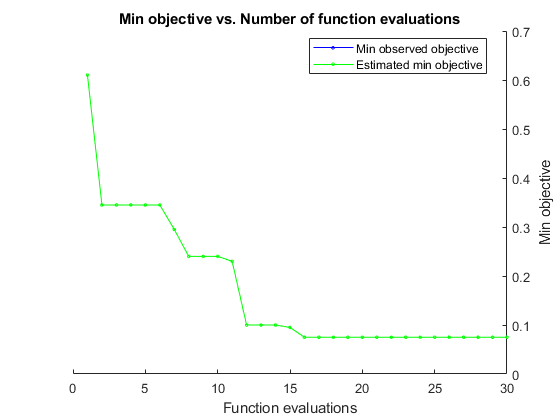
@plotMinObjective | 観測および推定された最小の関数値と関数評価の個数の関係をプロットします。 |
@plotElapsedTime | 最適化の合計経過時間、関数評価の合計時間、モデル化および点選択の合計時間という 3 つの曲線を関数評価の個数に対する関係としてプロットします。 |
メモ
連結制約がある場合、反復表示とプロット関数は次のような直観的ではない結果を与える可能性があります。
"最小目的" のプロットが増加します。
最適化において、以前に実行可能点が示された場合でも、問題が実行不可能であると宣言される場合があります。
このようになるのは、点が実行可能かどうかの判断が最適化の進行に応じて変化する可能性があるためです。bayesopt は制約モデルに関して実行可能性を判断しますが、このモデルは bayesopt が点を評価すると変化します。したがって、最小の点が後から実行不可能と判断された場合は "最小目的" プロットが増加し、反復表示には、後から実行不可能と判断される実行可能点が表示される可能性があります。
カスタム プロット関数の構文
カスタム プロット関数の構文はカスタム出力関数 (ベイズ最適化の出力関数を参照) と同じで、次のようになります。
stop = plotfun(results,state)
bayesopt は変数 results および state をカスタム関数に渡します。カスタム関数では、反復を停止する場合は true、継続する場合は false に設定した stop を返します。
results は、計算に関して使用できる情報が含まれている BayesianOptimization クラスのオブジェクトです。
state は次の値が可能です。
'initial'—bayesoptは反復を開始しようとしています。プロットの設定や他の初期化の実行にはこの状態を使用します。'iteration'—bayesoptは反復を 1 回完了したところです。一般に、ほとんどのプロットや他の計算はこの状態で実行します。'done'—bayesoptで最後の反復が完了しました。プロットをクリーンアップするか、プロット関数を停止する準備をします。
カスタム プロット関数の作成
この例では、bayesopt のカスタム プロット関数を作成する方法を示します。さらに、BayesianOptimization オブジェクトの UserData プロパティに含まれている情報を使用する方法を示します。
問題の定義
問題は、交差検証損失を最小化するサポート ベクター マシン (SVM) 分類のパラメーターを求めることです。具体的なモデルはbayesopt を使用した交差検証分類器の最適化の場合と同じです。したがって、目的関数は基本的に同じですが、UserData (このケースでは、現在のパラメーターに当てはめる SVM モデル内のサポート ベクターの個数) も計算する点が異なります。
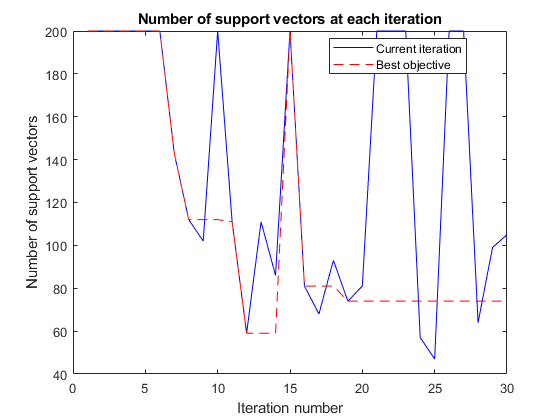
最適化の進行に応じて SVM モデル内のサポート ベクターの個数をプロットするカスタム プロット関数を作成します。プロット関数でサポート ベクターの個数にアクセスできるようにするため、サポート ベクターの個数を返す 3 番目の出力 UserData を作成します。
目的関数
目的関数を作成します。この関数では、固定された交差検証分割に対する交差検証損失を計算し、生成されたモデル内のサポート ベクターの個数を返します。
function [f,viol,nsupp] = mysvmminfn(x,cdata,grp,c) SVMModel = fitcsvm(cdata,grp,'KernelFunction','rbf',... 'KernelScale',x.sigma,'BoxConstraint',x.box); f = kfoldLoss(crossval(SVMModel,'CVPartition',c)); viol = []; nsupp = sum(SVMModel.IsSupportVector); end
カスタム プロット関数
UserData で計算される情報を使用するカスタム プロット関数を作成します。現在の制約の個数と最適な目的関数が見つかった状態におけるモデルの制約の個数の両方を関数にプロットさせます。
function stop = svmsuppvec(results,state) persistent hs nbest besthist nsupptrace stop = false; switch state case 'initial' hs = figure; besthist = []; nbest = 0; nsupptrace = []; case 'iteration' figure(hs) nsupp = results.UserDataTrace{end}; % get nsupp from UserDataTrace property. nsupptrace(end+1) = nsupp; % accumulate nsupp values in a vector. if (results.ObjectiveTrace(end) == min(results.ObjectiveTrace)) || (length(results.ObjectiveTrace) == 1) % current is best nbest = nsupp; end besthist = [besthist,nbest]; plot(1:length(nsupptrace),nsupptrace,'b',1:length(besthist),besthist,'r--') xlabel 'Iteration number' ylabel 'Number of support vectors' title 'Number of support vectors at each iteration' legend('Current iteration','Best objective','Location','best') drawnow end
モデルの設定
各クラスについて 10 個ずつの基底点を生成します。
rng default
grnpop = mvnrnd([1,0],eye(2),10);
redpop = mvnrnd([0,1],eye(2),10);
各クラスについて 100 個ずつのデータ点を生成します。
redpts = zeros(100,2);grnpts = redpts; for i = 1:100 grnpts(i,:) = mvnrnd(grnpop(randi(10),:),eye(2)*0.02); redpts(i,:) = mvnrnd(redpop(randi(10),:),eye(2)*0.02); end
データを 1 つの行列に格納し、各点のクラスにラベルを付けるベクトル grp を作成します。
cdata = [grnpts;redpts];
grp = ones(200,1);
% Green label 1, red label -1
grp(101:200) = -1;
既定の SVM パラメーターを使用して、すべてのデータの基本分類をチェックします。
SVMModel = fitcsvm(cdata,grp,'KernelFunction','rbf','ClassNames',[-1 1]);
交差検証を固定する分割を設定します。この手順を行わないと、交差検証がランダムになるので、目的関数が確定的ではなくなります。
c = cvpartition(200,'KFold',10);
元の当てはめたモデルの交差検証の精度をチェックします。
loss = kfoldLoss(fitcsvm(cdata,grp,'CVPartition',c,... 'KernelFunction','rbf','BoxConstraint',SVMModel.BoxConstraints(1),... 'KernelScale',SVMModel.KernelParameters.Scale))
loss =
0.1350
最適化用の変数の準備
目的関数は、入力 z = [rbf_sigma,boxconstraint] を受け入れ、交差検証損失値 z を返します。z の成分を 1e-5 ~ 1e5 の範囲で正の変数に対数変換します。どの値が適切であるかがわからないので、広い範囲を選択します。
sigma = optimizableVariable('sigma',[1e-5,1e5],'Transform','log'); box = optimizableVariable('box',[1e-5,1e5],'Transform','log');
プロット関数の設定とオプティマイザーの呼び出し
bayesopt を使用して最適なパラメーター [sigma,box] を求めます。再現性を得るために、'expected-improvement-plus' の獲得関数を選択します。既定の獲得関数は実行時に決定されるので、結果が異なる場合があります。
反復回数の関数としてサポート ベクターの個数をプロットし、見つかった最適なパラメーターに対するサポート ベクターの個数をプロットします。
obj = @(x)mysvmminfn(x,cdata,grp,c); results = bayesopt(obj,[sigma,box],... 'IsObjectiveDeterministic',true,'Verbose',0,... 'AcquisitionFunctionName','expected-improvement-plus',... 'PlotFcn',{@svmsuppvec,@plotObjectiveModel,@plotMinObjective})
results =
BayesianOptimization with properties:
ObjectiveFcn: @(x)mysvmminfn(x,cdata,grp,c)
VariableDescriptions: [1×2 optimizableVariable]
Options: [1×1 struct]
MinObjective: 0.0750
XAtMinObjective: [1×2 table]
MinEstimatedObjective: 0.0750
XAtMinEstimatedObjective: [1×2 table]
NumObjectiveEvaluations: 30
TotalElapsedTime: 19.2102
NextPoint: [1×2 table]
XTrace: [30×2 table]
ObjectiveTrace: [30×1 double]
ConstraintsTrace: []
UserDataTrace: {30×1 cell}
ObjectiveEvaluationTimeTrace: [30×1 double]
IterationTimeTrace: [30×1 double]
ErrorTrace: [30×1 double]
FeasibilityTrace: [30×1 logical]
FeasibilityProbabilityTrace: [30×1 double]
IndexOfMinimumTrace: [30×1 double]
ObjectiveMinimumTrace: [30×1 double]
EstimatedObjectiveMinimumTrace: [30×1 double]