Visual SLAM
Visual simultaneous localization and mapping (vSLAM) とは、カメラの位置と向きを推定すると同時に、視覚的入力を使用して周囲の環境地図を作成するプロセスです。Computer Vision Toolbox™ は、単眼カメラ、RGB-D カメラ、ステレオ カメラに対応した vSLAM ワークフローをサポートしており、精度向上のためのオプションとして慣性センサー フュージョンも利用できます。これらの機能は、ロボティクス、拡張現実、自律ナビゲーションなどの用途において不可欠です。vSLAM ワークフローの選択に関するガイダンスについては、Choose SLAM Workflow Based on Sensor Dataを参照してください。
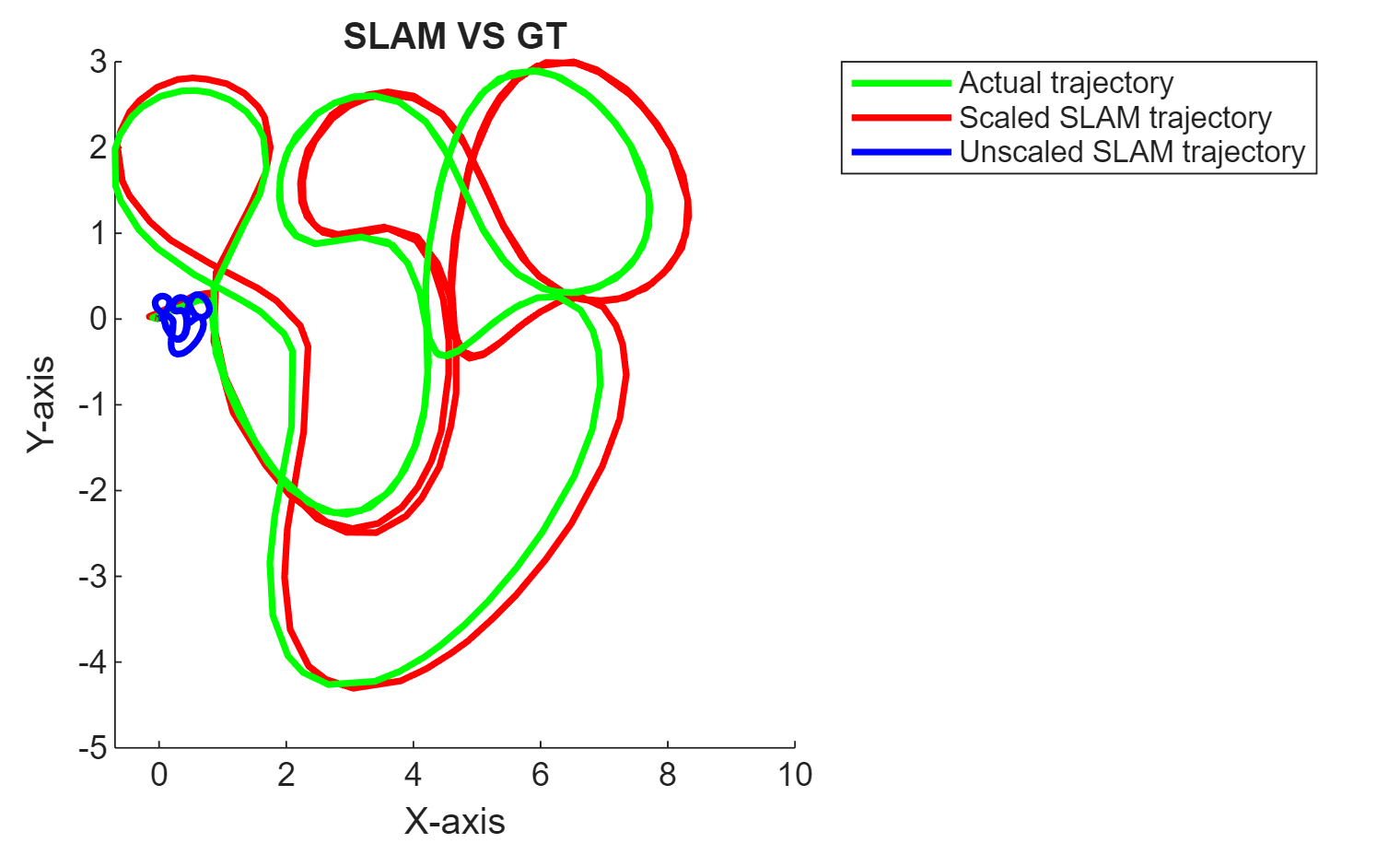
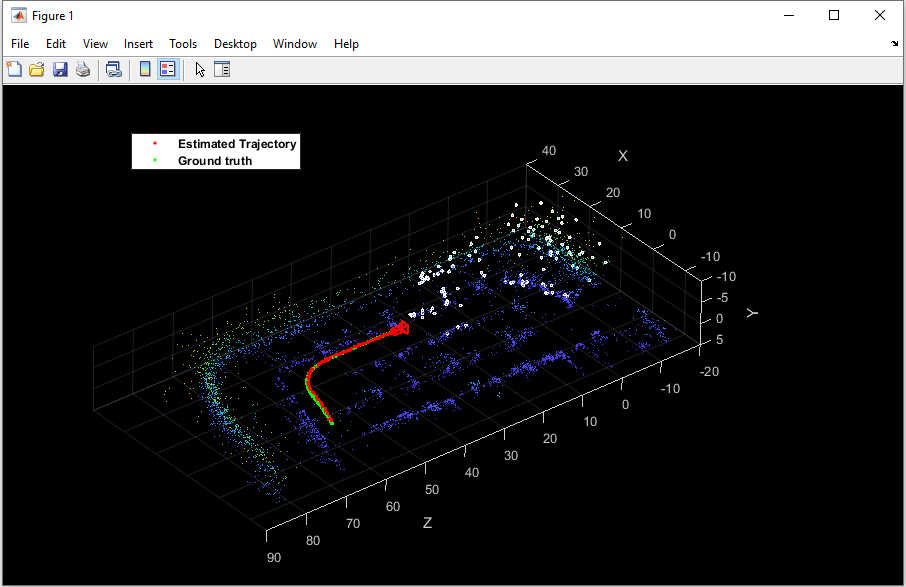
各 visual SLAM オブジェクト (monovslam、rgbdvslam、および stereovslam) は、フレームの追加、キーフレームの追跡、3 次元マップ点の計算、カメラ姿勢の推定、ループ閉じ込み、カメラ軌跡全体にわたるデータの可視化を行うための、即利用可能なツールを提供します。compareTrajectories 関数を使用して、推定されたカメラ軌跡をグラウンド トゥルースと比較し、vSLAM アルゴリズムの性能を評価することもできます。ツールボックスには、独自の visual SLAM パイプラインを構築するための機能も備わっています。
ツールボックスを使用して、vSLAM アルゴリズムのコード生成と展開を実行することもできます。詳細については、Build and Deploy Visual SLAM Algorithm with ROS in MATLABとPerformant and Deployable Monocular Visual SLAMを参照してください。
関数
トピック
即利用可能な Visual SLAM 関数
- Performant and Deployable Monocular Visual SLAM
Use visual inputs from a camera to perform vSLAM and generate multi-threaded C/C++ code. - Performant Monocular Visual-Inertial SLAM
Use visual inputs from a camera and positional data from an IMU to perform viSLAM in real time. (R2025a 以降) - Choose SLAM Workflow Based on Sensor Data
Choose the right simultaneous localization and mapping (SLAM) workflow and find topics, examples, and supported features. - How to Improve Accuracy in Visual SLAM
Tips to improve the accuracy, robustness, and efficiency of your visual SLAM system.
独自の Visual SLAM パイプラインの構築
- 単眼の Visual Simultaneous Localization and Mapping
Visual simultaneous localization and mapping (vSLAM)。 - Monocular Visual-Inertial SLAM
Perform SLAM by combining images captured by a monocular camera with measurements from an IMU sensor. - ステレオ Visual Simultaneous Localization and Mapping
ステレオ カメラのイメージ データを処理して、屋外環境マップを作成し、カメラの軌跡を推定します。
注目の例

Performant and Deployable Monocular Visual SLAM
Use visual inputs from a camera to perform vSLAM and generate multi-threaded C/C++ code.
Performant Monocular Visual-Inertial SLAM
Use visual inputs from a camera and positional data from an IMU to perform viSLAM in real time.

Performant and Deployable Stereo Visual SLAM with Fisheye Images
Use fisheye image data from a stereo camera to perform VSLAM and generate multi-threaded C/C++ code.

Build and Deploy Visual SLAM Algorithm with ROS in MATLAB
Implement and generate C ++ code for a vSLAM algorithm that estimates poses for the TUM RGB-D Benchmark and deploy as an ROS node to a remote device.

Simulate RGB-D Visual SLAM System with Cosimulation in Gazebo and Simulink
Simulates an RGB-D visual simultaneous localization and mapping (SLAM) system to estimate the camera poses using data from a mobile robot in Gazebo.

3D シミュレーションでの UAV ナビゲーション向けステレオ Visual SLAM
ステレオ カメラを搭載した UAV 用の Visual SLAM アルゴリズムの開発。

単眼ビジュアル オドメトリ
イメージのシーケンスを解析してカメラの位置と向きを特定する。

Develop Visual SLAM Algorithm Using Unreal Engine Simulation
Develop a visual simultaneous localization and mapping (SLAM) algorithm using image data from the Unreal Engine® simulation environment.
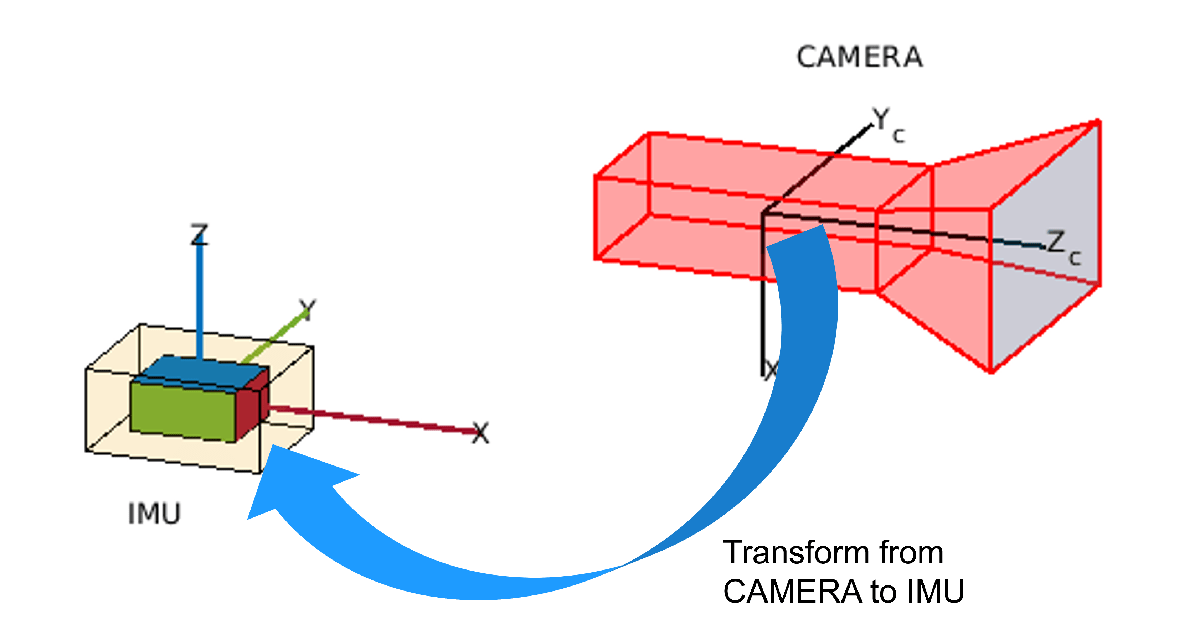
Estimate Camera-to-IMU Transformation Using Extrinsic Calibration
Estimate SE(3) transformation to define spatial relationship between camera and IMU.
Visual Localization in a Parking Lot
Develop a visual localization system using synthetic image data from the Unreal Engine® simulation environment.