このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
genss
一般化状態空間モデル
説明
一般化状態空間 (genss) モデルは、調整可能なパラメーターまたはコンポーネントを含む状態空間モデルです。genss モデルは、数値 LTI モデルを調整可能なコンポーネント (制御設計ブロック) を含むモデルと組み合わせたときに発生します。数値 LTI モデルと制御設計ブロックの詳細は、調整可能な係数をもつモデルを参照してください。
一般化状態空間モデルを使用すると、固定および調整可能なコンポーネントが混在している制御システムを表すことができます。一般化状態空間モデルは、systune や looptune といったコマンドを使用したパラメーター調査やパラメーター調整などの制御設計作業に使用します。
構築
genss モデルを構築するには、次を行います。
series、parallel、lft、またはconnectか、算術演算子+、-、*、/、\、および^を使用して数値 LTI モデルと制御設計ブロックを組み合わせる。以下を使用して、任意の数値 LTI モデル、制御設計ブロック、または
slTuner(Simulink Control Design) インターフェイス (sysなど) をgenss形式に変換する (Simulink® Control Design™ が必要)。gensys = genss(sys)
sysがslTunerインターフェイスである場合、gensysにはこのインターフェイスで指定されたすべての調整可能なブロックおよび解析ポイントが含まれます。特定の I/O 伝達関数の調整可能なモデルを計算するには、getIOTransfer(gensys,in,out)を呼び出します。ここで、inおよびoutは対象となる解析ポイントです(getPoints(sys)を使用して解析ポイントの完全なリストを取得します)。同様に、特定の開ループ伝達関数の調整可能なモデルを計算するには、getLoopTransfer(gensys,loc)を使用します。ここで、locは対象となる解析ポイントです。
プロパティ
|
一般化 LTI モデルまたは一般化行列に含まれる制御設計ブロックを含む構造体。 ドット表記を使用すると、これらの制御設計ブロックのいくつかの属性を変更できます。たとえば、一般化 LTI モデルまたは一般化行列 M.Blocks.a.Value = -1; |
|
調整可能なパラメーターおよび不確かさをもつパラメーターに対する状態空間行列の依存関係。一般化行列 ( これらのプロパティは、静的な制御設計ブロック 対応する状態空間行列が静的な制御設計ブロックに一切依存しない場合、これらのプロパティは double 行列として評価されます。 例については、状態空間行列のパラメーターへの依存関係を参照してください。 |
|
E 行列。一般化状態空間方程式が陰的である場合、double 行列として格納されます。値 |
|
状態名。次のいずれかとして格納されます。
既定値: すべての状態に対して |
|
状態単位のラベル。次のいずれかとして格納されます。
既定値: すべての状態に対して |
|
内部遅延を格納するベクトル。 内部遅延は、たとえば、システムで遅延のあるフィードバック ループを閉じるときや、遅延システムを順番にまたは並列で接続するときに生じます。内部遅延の詳細については、むだ時間のある閉フィードバック ループを参照してください。 連続時間モデルの場合、内部遅延はモデルの 内部遅延の値は変更できます。ただし、 |
|
各入力チャネルの入力遅延。スカラー値または数値ベクトルとして指定します。連続時間システムの場合、
既定値: 0 |
|
出力遅延。
既定値: すべての出力チャネルに対して 0 |
|
サンプル時間。連続時間モデルの場合、 このプロパティを変更してもモデルの離散化やリサンプリングは行われません。 既定値: |
|
モデル内の時間変数、サンプル時間
このプロパティを変更しても他のプロパティには影響しないため、システム全体の動作が変更されます。 既定値: |
|
入力チャネル名。以下のいずれかとして指定します。
または、自動的なベクトル拡張を使用して多入力モデルの入力名を割り当てます。たとえば、 sys.InputName = 'controls'; 入力名は自動的に 省略形表記 以下を含めて、入力チャネル名はいくつかの用途をもちます。
既定値: すべての入力チャネルに対する |
|
入力チャネル単位。以下のいずれかとして指定します。
既定値: すべての入力チャネルに対する |
|
入力チャネル グループ。 sys.InputGroup.controls = [1 2]; sys.InputGroup.noise = [3 5]; これは、入力チャネル 1、2 および 3、5 をそれぞれ含む sys(:,'controls') 既定値: フィールドのない構造体 |
|
出力チャネル名。次のいずれかとして指定されます。
または、自動的なベクトル拡張を使用して多出力モデルの出力名を割り当てます。たとえば、 sys.OutputName = 'measurements'; 出力名は自動的に 省略形表記 以下を含めて、出力チャネル名はいくつかの用途をもちます。
既定値: すべての出力チャネルに対して |
|
出力チャネル単位。次のいずれかとして指定されます。
既定値: すべての出力チャネルに対して |
|
出力チャネル グループ。 sys.OutputGroup.temperature = [1]; sys.OutputGroup.measurement = [3 5]; これは、出力チャネル 1 および 3、5 をそれぞれ含む sys('measurement',:)既定値: フィールドのない構造体 |
|
システム名。文字ベクトルとして指定します。たとえば、 既定値: |
|
システムに関連付ける任意のテキスト。string または文字ベクトルの cell 配列として格納されます。プロパティには指定したデータ型が格納されます。たとえば、 sys1.Notes = "sys1 has a string."; sys2.Notes = 'sys2 has a character vector.'; sys1.Notes sys2.Notes
ans =
"sys1 has a string."
ans =
'sys2 has a character vector.'
既定値: |
|
システムに関連付ける任意のデータ型。任意の MATLAB® データ型として指定します。 既定値: |
|
モデル配列のサンプリング グリッド。データ構造として指定されます。 1 つ以上の独立変数をサンプリングすることによって得られるモデル配列の場合、このプロパティは配列内の各モデルに関連付けられた変数値を追跡します。この情報はモデル配列を表示またはプロットすると表示されます。この情報を使用して、結果を独立変数まで遡ります。 データ構造のフィールド名をサンプリング変数の名前に設定します。フィールドの値を、配列内の各モデルに関連付けられているサンプリングされた変数の値に設定します。すべてのサンプリング変数は数値でスカラー値でなければならず、サンプル値のすべての配列はモデル配列の次元に一致しなければなりません。 たとえば、 sysarr.SamplingGrid = struct('time',0:10)同様に、2 つの変数 [zeta,w] = ndgrid(<6 values of zeta>,<9 values of w>) M.SamplingGrid = struct('zeta',zeta,'w',w)
M M(:,:,1,1) [zeta=0.3, w=5] =
25
--------------
s^2 + 3 s + 25
M(:,:,2,1) [zeta=0.35, w=5] =
25
----------------
s^2 + 3.5 s + 25
...複数のパラメーター値または操作点で Simulink モデルを線形化することにより生成されたモデル配列の場合、 既定値: |
例
調整可能なローパス フィルター
この例では、1 つの調整可能なパラメーター a をもつローパス フィルターを作成します。
tunableTF ブロックの分子と分母の係数が独立しているため、tunableTF を使用して F を表すことはできません。代わりに、調整可能な実数パラメーター オブジェクト realp を使って F を構成します。
初期値 10 の実数の調整可能なパラメーターを作成します。
a = realp('a',10)a =
Name: 'a'
Value: 10
Minimum: -Inf
Maximum: Inf
Free: 1
Real scalar parameter.
調整可能なローパス フィルター F を作成するには、tf を使用します。
numerator = a; denominator = [1,a]; F = tf(numerator,denominator)
Generalized continuous-time state-space model with 1 outputs, 1 inputs, 1 states, and the following blocks: a: Scalar parameter, 2 occurrences. Type "ss(F)" to see the current value and "F.Blocks" to interact with the blocks.
F は、Blocks プロパティに調整可能なパラメーター a をもつ genss オブジェクトです。F を他の調整可能なモデルまたは数値モデルと接続して、より複雑な制御システムのモデルを作成できます。例については、調整可能なコンポーネントを含む制御システムを参照してください。
固定パラメーターと調整可能なパラメーターの両方をもつ状態空間モデルの作成
この例では、固定パラメーターと調整可能なパラメーターの両方をもつ状態空間genssモデルを作成する方法を説明します。
ここで、a と b は初期値がそれぞれ -1 と 3 の調整可能なパラメーターです。
realpを使用して調整可能なパラメーターを作成します。
a = realp('a',-1); b = realp('b',3);
a と b の代数式を使って一般化行列を定義します。
A = [1 a+b;0 a*b];
A は、Blocks プロパティに a と b を含む一般化行列です。a と b の初期値から、A の初期値は [1 2;0 -3] です。
固定値状態空間行列を作成します。
B = [-3.0;1.5]; C = [0.3 0]; D = 0;
ssを使用して状態空間モデルを作成します。
sys = ss(A,B,C,D)
Generalized continuous-time state-space model with 1 outputs, 1 inputs, 2 states, and the following blocks: a: Scalar parameter, 2 occurrences. b: Scalar parameter, 2 occurrences. Type "ss(sys)" to see the current value and "sys.Blocks" to interact with the blocks.
sys は、調整可能なパラメーター a および b を含む一般化 LTI モデル (genss) です。
数値および調整可能なコンポーネントの両方をもつ制御システム モデル
この例では、固定されたプラントとセンサー ダイナミクスおよび調整可能な制御コンポーネントの両方をもつ制御システムの調整可能モデルを作成する方法を示します。
次の図の制御システムについて考えます。
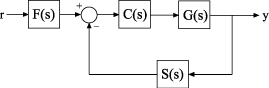
プラント応答は で、センサー ダイナミクスのモデルは であると仮定します。コントローラー は調整可能な PID コントローラーであり、プレフィルター は 1 つの調整可能なパラメーター a をもつローパス フィルターです。
プラントとセンサー ダイナミクスを表すモデルを作成します。プラントとセンサー ダイナミクスは固定なので、それらを数値 LTI モデルで表します。
G = zpk([],[-1,-1],1); S = tf(5,[1 4]);
調整可能なコンポーネントをモデル化するには、制御設計ブロックを使用します。コントローラー C の調整可能な表現を作成します。
C = tunablePID('C','PID');
C は tunablePID オブジェクトであり、事前定義された比例-積分-微分 (PID) 構造をもつ制御設計ブロックです。
1 つの調整可能なパラメーターをもつフィルター のモデルを作成します。
a = realp('a',10);
F = tf(a,[1 a]);a は、初期値 10 の realp (調整可能な実数パラメーター) オブジェクトです。a を tf 内の係数として使用すると、調整可能な genss モデル オブジェクト F が作成されます。
モデルを相互接続して r から y への完全な閉ループ応答のモデルを作成します。
T = feedback(G*C,S)*F
Generalized continuous-time state-space model with 1 outputs, 1 inputs, 5 states, and the following blocks: C: Tunable PID controller, 1 occurrences. a: Scalar parameter, 2 occurrences. Type "ss(T)" to see the current value and "T.Blocks" to interact with the blocks.
T は genss モデル オブジェクトです。数値 LTI モデルのみを接続することによって形成される統合モデルとは対照的に、T は制御システムの調整可能な要素を記録しています。調整可能な要素は、genss モデル オブジェクトの Blocks プロパティに格納されます。T の調整可能な要素を調べます。
T.Blocks
ans = struct with fields:
C: [1x1 tunablePID]
a: [1x1 realp]
調整可能なコンポーネントをもつ制御システムの genss モデルを作成する場合は、systune などの調整コマンドを使用して、指定した設計要件を満たすように自由パラメーターを調整できます。
一般化状態空間モデルの状態名の追跡
ラベル付きの状態名をもつ genss モデルを作成します。これを行うには、コンポーネント モデルを相互接続する前に、コンポーネントの LTI モデルの状態にラベルを付けます。たとえば、2 状態の固定係数プラント モデルと 1 状態の調整可能なコントローラーを接続します。
A = [-1 -1; 1 0];
B = [1; 0];
C = [0 1];
D = 0;
G = ss(A,B,C,D);
G.StateName = {'Pstate1','Pstate2'};
C = tunableSS('C',1,1,1);
L = G*C;genss モデル L は、これを作成したコンポーネントの状態名を保持します。調整可能なコンポーネント C には状態名を割り当てていないため、ソフトウェアが自動的に状態名を割り当てます。確認するには、L の状態名を調べます。
L.StateName
ans = 3x1 cell
{'Pstate1'}
{'Pstate2'}
{'C.x1' }
制御設計ブロックに状態名が自動的に割り当てられることで、一般化モデルのどの状態が調整可能コンポーネントから得られたものかを追跡することができます。
状態名は、genss モデルを固定係数の状態空間モデルに変換する場合にも保持されます。確認するには、L を ss 形式に変換します。
Lfixed = ss(L); Lfixed.StateName
ans = 3x1 cell
{'Pstate1'}
{'Pstate2'}
{'C.x1' }
genss モデルの StateUnit プロパティに格納される状態単位ラベルも同様に動作します。
状態空間行列のパラメーターへの依存関係
調整可能なパラメーターをもつ一般化モデルを作成し、そのパラメーターに対する行列 A の依存関係を調べます。これを行うには、一般化モデルの A プロパティを調べます。
G = tf(1,[1 10]);
k = realp('k',1);
F = tf(k,[1 k]);
L1 = G*F;
L1.AGeneralized matrix with 2 rows, 2 columns, and the following blocks: k: Scalar parameter, 2 occurrences. Type "double(ans)" to see the current value and "ans.Blocks" to interact with the blocks.
A プロパティは、調整可能な実数パラメーター k への依存関係を保持する一般化行列です。状態空間行列のプロパティ A、B、C、および D は、静的パラメーターへの依存関係のみを保持します。genss モデルが動的な制御設計ブロックをもつ場合、状態空間行列のプロパティを評価に際して、これらはその現在値に設定されます。たとえば、調整可能な PI ブロックをもつ genss モデルの行列 A のプロパティを調べます。
C = tunablePID('C','PI'); L2 = G*C; L2.A
ans = 2×2
-10.0000 0.0010
0 0
ここで、行列 A は double 行列として格納され、その値は L2 の現在の値からなる行列 A です。
L2cur = ss(L2); L2cur.A
ans = 2×2
-10.0000 0.0010
0 0
また、ssdata を使用して状態空間行列を抽出すると、静的ブロックも含め、すべての制御設計ブロックがその現在の値またはノミナル値に設定されます。したがって、以下の操作はすべて L1 の行列 A の現在の値を返します。
[A,B,C,D] = ssdata(L1); A
A = 2×2
-10 1
0 -1
double(L1.A)
ans = 2×2
-10 1
0 -1
L1cur = ss(L1); L1cur.A
ans = 2×2
-10 1
0 -1
ヒント
バージョン履歴
R2011a で導入
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)