Simulink 関数
Simulink 関数を使用して、Simulink モデルの階層構造でアクセスできる関数を定義できます。Simulink 関数は、与えられた入力と関数の実装された動作に基づいて一連の出力を計算します。Simulink 関数を使用して、次のことができます。
関数名と入力引数および出力引数を含む関数プロトタイプを指定する (例
y = f(u))。Simulink Function ブロック、Stateflow® チャートからエクスポートされた関数、または S-Function ブロックを使用して、Simulink 環境で関数の動作を実装する。
モデルの階層構造全体で関数を呼び出して再利用する。
詳細については、Simulink 関数の概要を参照してください。
ブロック
トピック
Simulink 関数の理解
- Simulink 関数の概要
Simulink 関数を使用して、Simulink モデルの階層構造でアクセスできる関数を定義する。 - モデルでの Simulink 関数の定義
Simulink Function ブロック、エクスポートされた Stateflow 関数、または S-Function ブロックを使用して Simulink 関数を定義する。 - モデルからの Simulink 関数の呼び出し
Function Caller ブロック、Stateflow チャート、MATLAB Function ブロックか MATLAB System ブロック、S-Function ブロック、または SimEvents® ブロックのイベント アクションを使用して Simulink 関数を呼び出す。 - スコープ内、グローバル、および端子スコープ内の Simulink Function ブロックの概要
Simulink Function ブロックの可視性とアクセスの指定 - 参照モデルにおける Simulink Function ブロック
モデル コンポーネントで関数を追加し、関数にアクセスします。
スコープ内の Simulink 関数
- サブシステムのスコープ内の Simulink Function ブロック
関数のスコープをサブシステムに制限する。 - モデルのスコープ内の Simulink Function ブロック
関数のスコープをモデルに制限する。 - Resolve Error: Block Is Unable to Call The Scoped Simulink Function
Troubleshoot block unable to call the function error in Simulink.
端子スコープ内の Simulink 関数
- Model Client and Server Components Using Function Ports
Use function ports to model client and server components in a service-oriented architecture. - Service Interfaces Overview (System Composer)
Create client and server ports, author service interfaces, and simulate service-oriented communication.
関連情報
- Model Service-Oriented Communication Between Sensors (System Composer)
- Simulate Asynchronous Services for Vehicle Headlight Management (System Composer)
- Trigger Simulink Components with Discrete Events in SimEvents (SimEvents)
- AUTOSAR クライアント/サーバー通信の構成 (AUTOSAR Blockset)
- AUTOSAR Adaptive サービス通信のモデル化 (AUTOSAR Blockset)
- Simulink Function ブロックからの再呼び出し可能なコードの生成 (Embedded Coder)
注目の例
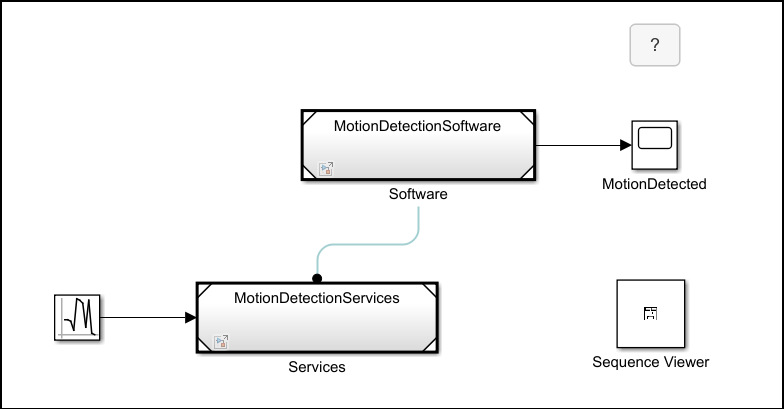
スコープ内の Simulink 関数を使用したアプリケーション ソフトウェアからのサービス アクセスのモデル化
この例は、サービスと、個別のコンポーネントからのこれらのサービスへのアクセスをモデル化する方法を示しています。
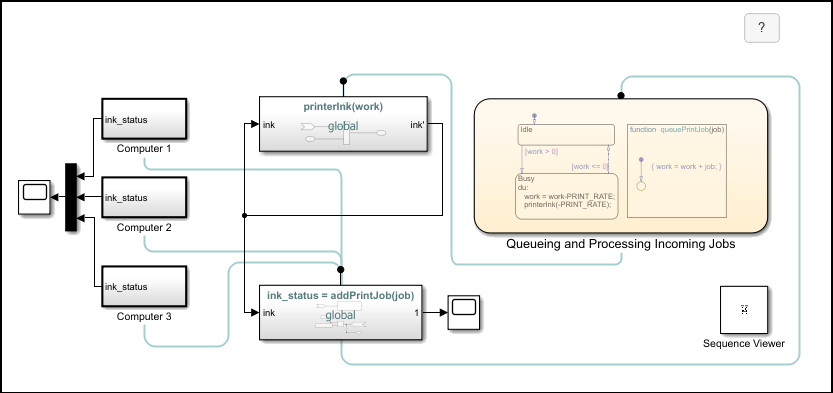
Simulink 関数を使用した共有プリンターでのインク状態の監視
この例では、複数のクライアントから 1 つのサーバーにリクエストを送信し、サーバーから状態を受信する方法を示します。Simulink® 関数を使用すると、さまざまなサブシステムで他のサブシステムの関数を呼び出し、Simulink および Stateflow® でやり取りできます。この例では、Simulink 関数を使用して共有プリンターのインク状態の監視をモデル化します。

Simulink 関数の複数のインスタンスの再利用
コンポーネントを再利用するために関数の複数のインスタンスを使用する。
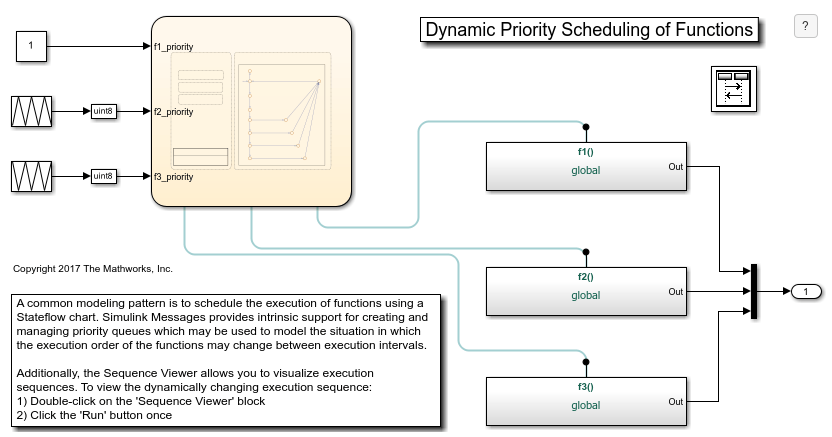
関数の動的な優先順位スケジューリング
この例では、Stateflow® チャートを使って関数の実行を動的にスケジュールする一般的なモデル化パターンを示します。

メッセージを使用して通信する温度制御システム
部屋にあるサーモスタットからのメッセージを処理し、メッセージを使用してさまざまな受信側と制御コマンドをやり取りすることによる室温の分散制御。
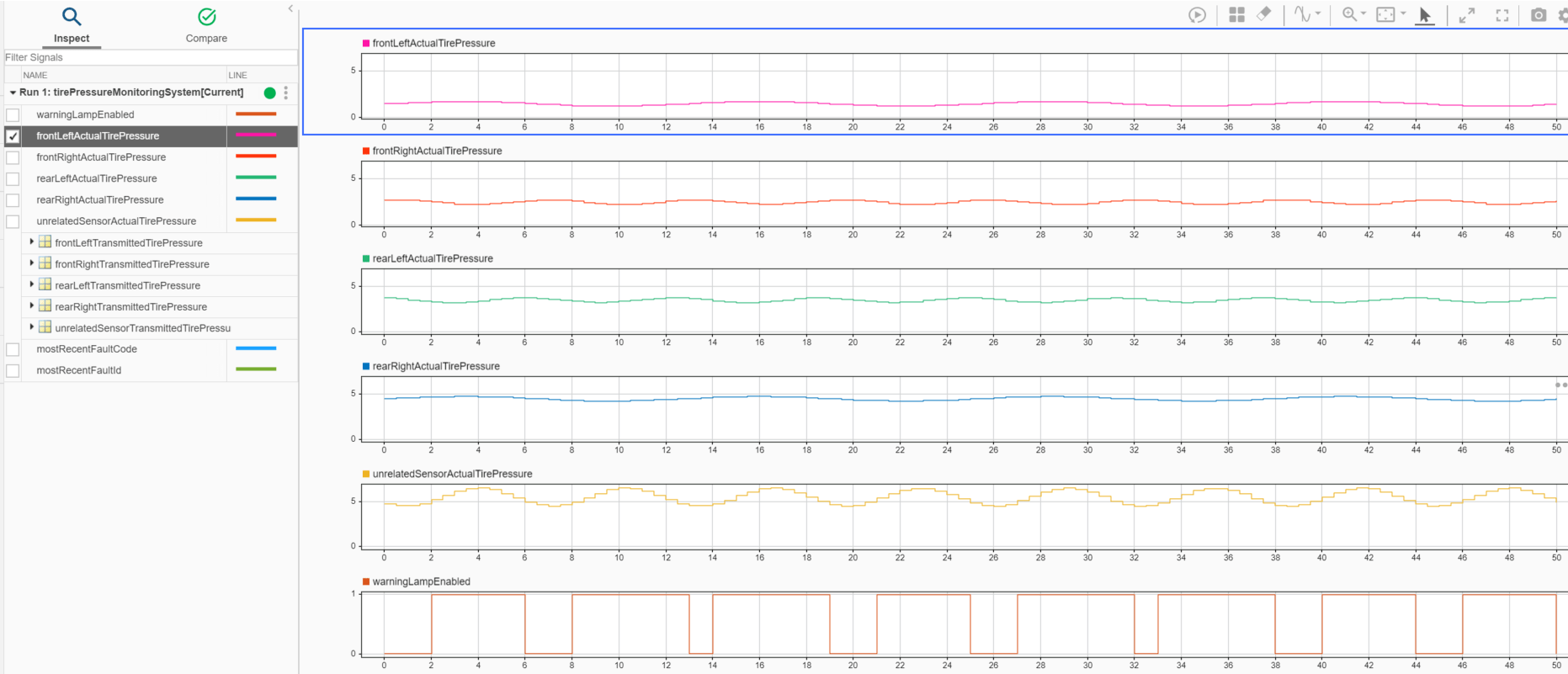
Wireless Tire Pressure Monitoring System with Fault Logging
Model a wireless tire pressure monitoring system with fault logging using message communication.