Function Caller
Simulink 関数を呼び出す
ライブラリ:
Simulink /
User-Defined Functions
説明
Function Caller ブロックは Simulink® 関数を呼び出して実行します。Simulink 関数は、関数名と入力引数および出力引数を含む関数プロトタイプを指定します。たとえば、Function Caller ブロックがプロトタイプ y = f(u) をもつ関数を呼び出す場合、Function Caller ブロックの入力は Simulink 関数の入力引数 u であり、Simulink 関数の出力引数 y は Function Caller ブロックの出力です。
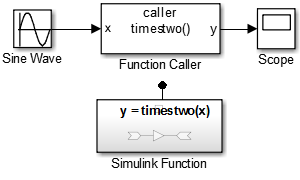
この例の Function Caller ブロックは、Simulink Function ブロックで定義された Simulink 関数 y = timestwo(x) を呼び出して実行するように構成されています。関数呼び出しをテストするために、入力データを供給する Sine Wave ブロックが入力端子 x に接続されており、出力から結果を表示する Scope ブロックが出力端子 y に接続されています。
Simulink Function ブロック、エクスポートされた関数としての Stateflow® Chart (Stateflow)、または S-Function ブロックで定義された Simulink 関数を呼び出すことができます。Simulink 関数の定義の詳細については、モデルでの Simulink 関数の定義を参照してください。
詳細については、Simulink 関数の概要を参照してください。
ヒント
Function Caller ブロックを使用して、モデルの階層構造の外部にある関数を呼び出すことができます。
詳細については、参照モデルにおける Simulink Function ブロックを参照してください。
Simulink Function ブロックと Function Caller ブロックを使用したコード生成
Simulink Coder™ または Embedded Coder® がある場合、Simulink 関数を含むモデルからコードを生成できます。詳細については、Simulink Function ブロックとコードの生成 (Embedded Coder)およびConfigure C Entry-Point Function Interfaces for Simulink Function and Function Caller Blocks (Embedded Coder)を参照してください。
例

Simulink 関数の複数のインスタンスの再利用
コンポーネントを再利用するために関数の複数のインスタンスを使用する。
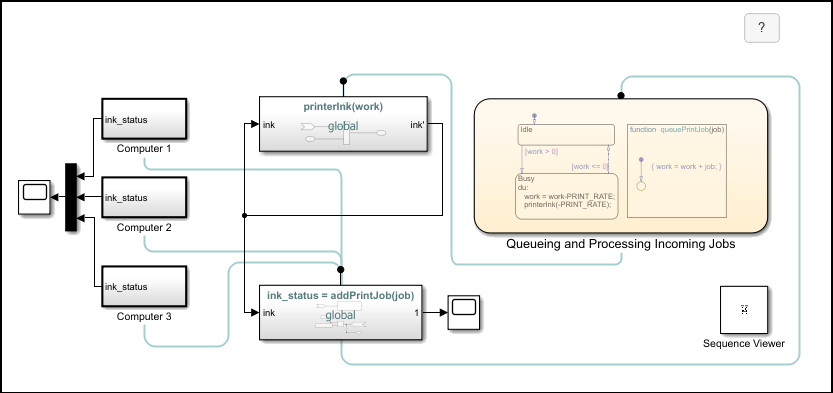
Simulink 関数を使用した共有プリンターでのインク状態の監視
この例では、複数のクライアントから 1 つのサーバーにリクエストを送信し、サーバーから状態を受信する方法を示します。Simulink® 関数を使用すると、さまざまなサブシステムで他のサブシステムの関数を呼び出し、Simulink および Stateflow® でやり取りできます。この例では、Simulink 関数を使用して共有プリンターのインク状態の監視をモデル化します。

メッセージを使用して通信する温度制御システム
部屋にあるサーモスタットからのメッセージを処理し、メッセージを使用してさまざまな受信側と制御コマンドをやり取りすることによる室温の分散制御。
端子
入力
出力
パラメーター
ブロックの特性
データ型 |
|
直達 |
|
多次元信号 |
|
可変サイズの信号 |
|
ゼロクロッシング検出 |
|