ロボティクスおよび自律システム
ロボティクスおよび自律システムとは、自動車、航空機、ロボット、UAV など、物理環境の中でゴールに向かう行動のために移動し動作するプラットフォームのシステムのことをいいます。複数のツールボックスのツールおよびアルゴリズムにより、プラットフォームの位置や速度などの状態のシミュレーション、推定、ナビゲーション、制御、および物理環境のモニタリングが可能です。具体的には、以下を行うことができます。
プラットフォーム、軌跡、パス、センサー、環境を組み込んだ自律システムのシナリオを設計してモデル化し、さまざまな座標系とマップを使用してシミュレーションする。
検出値の生成と分類、プラットフォームの推定、環境の各種マップの取得を行う。
ロボット、UAV、自動車のパスを、多様な運動特性に基づき、さまざまなパス計画アルゴリズムを使用して計画する。
ロボット、UAV、自動車を複数のモーション制御アルゴリズムおよび手法により制御する。
ミドルウェア (ROS など) を介してロボットやシミュレーターに接続し、設計した推定、ナビゲーション、および制御アルゴリズムをハードウェア上に展開する。
ロボティクスおよび自律システム 向け製品
Automated Driving Toolbox
ADAS および自動運転システムの設計、シミュレーション、およびテスト
Robotics System Toolbox
ロボティクス アプリケーションの設計、シミュレーション、テストおよび展開
UAV Toolbox
UAV アプリケーションの設計、シミュレーションおよび展開
ROS Toolbox
ROS ベースのアプリケーションの設計、シミュレーションおよび展開
Sensor Fusion and Tracking Toolbox
マルチセンサー トラッキングおよび測位システムの設計、シミュレーション、テスト
RoadRunner
自動運転シミュレーション用の 3D シーンの設計
RoadRunner Scenario
自動運転シミュレーションのシナリオ作成および再生
Simulink 3D Animation
Simulate and visualize dynamic systems in a 3D environment
トピック
オフロードの自律運転
- Simulate Earth Moving with Autonomous Excavator in Construction Site (Robotics System Toolbox)
Simulate ground excavation to create a depression and move spoil to dump truck and further relocate it to another site. (R2024b 以降) - Generate Traversability Map for Offroad Terrain Using Semantic Segmentation (Robotics System Toolbox)
Create real-time traversability map for offroad terrain by fusing semantic segmentation from camera images with lidar point clouds. (R2026a 以降)
シナリオ設計とシミュレーション
- 単純な RoadRunner シーンの作成 (RoadRunner)
RoadRunner シーン編集ソフトウェアを使用して、単純な道路ネットワークを作成する。 - Create Driving Scenario Interactively and Generate Synthetic Sensor Data (Automated Driving Toolbox)
Use the Driving Scenario Designer app to create a driving scenario and generate sensor detections and point cloud data from the scenario. - Generate RoadRunner Scenario from Recorded Sensor Data (Automated Driving Toolbox)
Generate RoadRunner Scenario from recorded GPS data and preprocessed actor track list. - Aerodynamic Parameter Estimation Using Flight Log Data (UAV Toolbox)
Improve the accuracy of a UAV model by using flight log data to estimate the aerodynamic parameters of the UAV.
状況認識と状態推定
- Extended Object Tracking of Highway Vehicles with Radar and Camera (Sensor Fusion and Tracking Toolbox)
Track highway vehicles around an ego vehicle as extended objects that span multiple sensor resolution cells. - Visual-Inertial Odometry Using Synthetic Data (Sensor Fusion and Tracking Toolbox)
Estimate the pose (position and orientation) of a ground vehicle using an inertial measurement unit (IMU) and a monocular camera. - 慣性ナビゲーションの IMU と GPS フュージョン (Navigation Toolbox)
この例では、無人航空機 (UAV) またはクワッドコプターに適した IMU と GPS のフュージョン アルゴリズムを作成する方法を示します。
モーション プランニング
- Object Tracking and Motion Planning Using Frenet Reference Path (Sensor Fusion and Tracking Toolbox)
Dynamically plan the motion of an autonomous vehicle based on estimates of the surrounding environment. (R2021b 以降) - Plan Path for Manipulator in Simulink with Robotics System Toolbox (Robotics System Toolbox)
Simulate manipulator path planning in Simulink® with code generation for autonomy functions from MATLAB®.
モーション制御
- Highway Lane Following with RoadRunner Scenario (Automated Driving Toolbox)
Simulate highway lane following application, designed in Simulink, with RoadRunner Scenario. - Path Following with Obstacle Avoidance in Simulink (Navigation Toolbox)
Use Simulink® to avoid obstacles while following a path for a differential drive robot.
ハードウェアへの展開
- Run ArduPilot Software-in-the-Loop Simulation with Quadcopter Plant in Simulink (UAV Toolbox)
Verify a quadcopter controller design by using Software-in-the-Loop (SITL) simulation and simulating the quadcopter plant model in Simulink. - PX4 Hardware-in-the-Loop (HITL) Simulation with Fixed-Wing Plant in Simulink (UAV Toolbox)
This example shows how to use the UAV Toolbox Support Package for PX4® Autopilots to verify the controller design by deploying the design on the PX4 Autopilot hardware board. - Estimating Orientation Using Inertial Sensor Fusion and MPU-9250 (Sensor Fusion and Tracking Toolbox)
Obtain data from an InvenSense MPU-9250 IMU sensor, and to use the 6-axis and 9-axis fusion algorithms in the sensor data to compute orientation of the device. - Sign Following Robot with ROS in MATLAB (ROS Toolbox)
Control a simulated robot running on a separate ROS-based simulator over a ROS network using MATLAB.
ROS データとネットワーク解析
- Get Started with ROS 2 Network Analyzer App (ROS Toolbox)
Use ROS 2 Network Analyzer app to visualize and analyze nodes, topics, services, and actions interaction in ROS 2 network. (R2024b 以降) - Visualize Messages from Live ROS or ROS 2 Topics (ROS Toolbox)
Visualize messages from live ROS or ROS 2 topics in ROS Data Analyzer app. - Publish Ground Truth and Sensor Data from RoadRunner Scenario to ROS 2 Network (ROS Toolbox)
Publish ground-truth and sensor data from a RoadRunner scenario to ROS 2 network and visualize it using ROS Data Analyzer app. (R2025a 以降)
関連情報
注目の例

露天掘り鉱山での自律運搬トラックのオフロード ナビゲーション
シリーズでは、自律運搬トラックが平坦でない地形を移動して障害物を回避できるようにする一連のプランナーを作成する方法を説明します。

VTOL UAV のコントローラーの設計と調整
次世代空モビリティ アプリケーションにおけるティルトローター VTOL UAV の設計、調整、展開、および可視化。

Intelligent Bin Picking System in Simulink
Design an intelligent bin picking system for a manipulator in an Unreal Engine simulation environment.
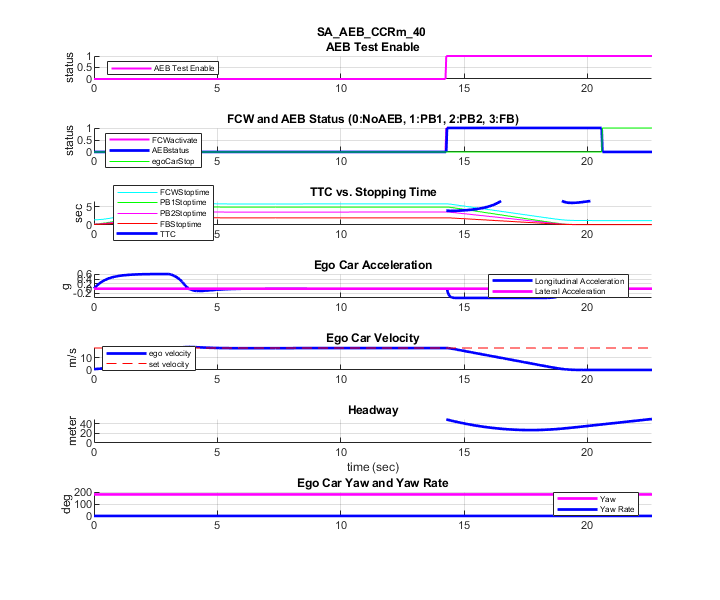
AEB Test Bench for Euro NCAP Scenarios
Configure AEB test bench designed in Simulink and simulate a scenario in RoadRunner Scenario per Euro NCAP® testing protocols.
Processor-in-the-Loop Verification of JPDA Tracker for Automotive Applications
Generate embedded code for a JPDA tracker and verify it using processor-in-the-loop (PIL) simulations.

アラン分散を使用した慣性センサーのノイズ解析
この例では、アラン分散を使用して MEMS ジャイロスコープのノイズ パラメーターを特定する方法を示します。これらのパラメーターは、ジャイロスコープをモデル化するためにシミュレーションで使用できます。ジャイロスコープの測定は次のようにモデル化されます。