自動車
MathWorks® の自動車用製品を使用するエンジニアは、車両開発プロセスを加速させ、安全性、快適性、および性能の面で市場の要求を満たす車両を提供することができます。自動車エンジニアは、MathWorks のソフトウェアをご利用いただくことで、以下を行うことができます。
車両の燃費、排気、およびパフォーマンスに関するシミュレーションを実行する。
自動運転システムのための知覚、プラニング、および制御アルゴリズムを開発しテストする。
ラピッド プロトタイピングにより、要件を早期に検証する。
MCU、GPU、SoC、FPGA デバイス用の、浮動小数点または固定小数点でのプロトタイピングまたは量産用のコードを生成する。
テスト フリートおよび生産車両データを解析する。
ASPICE、AUTOSAR、および ISO 26262 の安全規格に準拠する。
自動車 向け製品
Model-Based Calibration Toolbox
Model and calibrate complex powertrain systems
Powertrain Blockset
Model and simulate automotive powertrain systems
Vehicle Dynamics Blockset
バーチャル 3D 環境での車両運動のモデル化とシミュレーション
Automated Driving Toolbox
ADAS および自動運転システムの設計、シミュレーション、およびテスト
IEC Certification Kit
Qualify software tools for ISO 26262 and IEC 61508 certification
Vehicle Network Toolbox
CAN、J1939、XCP プロトコルを使用して車載ネットワークと通信する
AUTOSAR Blockset
AUTOSAR ソフトウェアの設計とシミュレーション
RoadRunner
自動運転シミュレーション用の 3D シーンの設計
RoadRunner Scenario
自動運転シミュレーションのシナリオ作成および再生
Simulink 3D Animation
Simulate and visualize dynamic systems in a 3D environment
トピック
電動車
- Develop, Resize, and Calibrate Motors with Dynamometer Test Harness (Powertrain Blockset)
Develop a control test bench, resize e-motors, and calibrate controllers using the motor dynamometer reference application. - Build Full Electric Vehicle Model (Powertrain Blockset)
Build a vehicle with a motor-generator, battery, direct-drive transmission, and powertrain control algorithms using the electric vehicle (EV) reference application. - Hybrid and Electric Vehicle Reference Application Projects (Powertrain Blockset)
Start building your own hybrid and electric vehicle models with reference application projects. - Generate Optimal Current Controller Calibration Tables for Permanent Magnet Synchronous Motors (Powertrain Blockset)
Generate optimized current controller and flux parameters for permanent magnet synchronous motor (PMSM) blocks. - Preprocess Permanent Magnet Synchronous Motor (PMSM) Data and Autogenerate Current Controller Calibration Tables (Model-Based Calibration Toolbox)
Permanent magnet synchronous motor (PMSM) data preprocessing.
自動運転および先進運転支援システム
- Code Generation for Path Planning and Vehicle Control (Automated Driving Toolbox)
Generate C++ code for a path planning and vehicle control algorithm, and verify the code using software-in-the-loop simulation. - Generate RoadRunner Scenario from Recorded Sensor Data (Automated Driving Toolbox)
Generate RoadRunner Scenario from recorded GPS data and preprocessed actor track list. - CAN FD と TCP/IP を使用した前方衝突警告アプリケーション (Vehicle Network Toolbox)
この例では、CAN FD および TCP/IP プロトコルを介してセンサーとビジョン データをライブで再生して前方衝突警告 (FCW) アプリケーションを実行する方法を示します。 - Lane-Keeping System for Self-Driving Trucks (Automated Driving Toolbox)
Design a lane-keeping system for self-driving trucks in Simulink® and simulate it with RoadRunner Scenario.
バーチャル車両のプロトタイピングおよび設計の最適化
- バーチャル ビークル コンポーザー入門 (Vehicle Dynamics Blockset)
バーチャル ビークル コンポーザー アプリを使用してバーチャル車両の作成、テスト、および解析を行う。 - ダブルレーン チェンジ操縦 (Vehicle Dynamics Blockset)
ヨー安定性などの車両の走行およびハンドリングの解析に使用するリファレンス アプリケーション。 - Kinematics and Compliance Virtual Test Laboratory (Vehicle Dynamics Blockset)
Virtually calibrate suspension blocks using this reference application. - オートバイ縦断面ブレーキ テスト (Vehicle Dynamics Blockset)
ブレーキ テストにおけるオートバイの走行およびハンドリングの解析に使用するリファレンス アプリケーション。
パワートレイン プロトタイピング、設計の最適化、およびキャリブレーション
- Internal Combustion Engine Reference Application Projects (Powertrain Blockset)
Use these reference applications as a starting point for your own internal combustion engine vehicle models. - Spark Ignition (SI) Calibration Workflow (Model-Based Calibration Toolbox)
Systematically develop a set of optimal steady-state SI engine calibration tables using the Model-Based Calibration Toolbox™. - Simulate Five-Cycle Energy Consumption Tests Using Virtual Vehicle Model (Powertrain Blockset)
Generate energy consumption data to use in range adjustment factor calculations for an electric vehicle. - Characterize Powertrain Blockset and Simscape Battery Blocks (App) (Model-Based Calibration Toolbox)
Characterize Simulink or Simscape™ battery block parameters using the MBC Optimization app.
規格準拠およびコードの検証と妥当性確認
- AUTOSAR コンポーネントの設計とシミュレーションおよびコードの生成 (AUTOSAR Blockset)
動作アルゴリズムの実装、コンポーネントとコンポジションのシミュレーション、コンポーネント コードの生成を行い、AUTOSAR のコンポーネントを開発します。 - Generate Drive Cycles for Real Driving Emissions (Powertrain Blockset)
Meet the Real Driving Emissions standard required by the European Union. - Highway Lane Following: A Model-Based Design Example for ISO 26262:2018 (IEC Certification Kit)
Demonstrates the use of Simulink to apply a Model-Based Design workflow to an ISO 26262 ASIL D project. - SimulinkでCAN経由の分散ECUネットワークを実装する (Vehicle Network Toolbox)
Vehicle Network Toolbox™ と Simulink を使用して、自動車用の CAN 経由の分散型電子制御ユニット (ECU) ネットワークを実装します。
注目の例

Autonomous Emergency Braking with High-Fidelity Vehicle Dynamics
Design autonomous emergency braking system with 14DOF vehicle dynamics in Simulink and cosimulate with RoadRunner Scenario.

Build Full Electric Vehicle Model
Build a vehicle with a motor-generator, battery, direct-drive transmission, and powertrain control algorithms using the electric vehicle (EV) reference application.

AUTOSAR ソフトウェア コンポーネントの作成と設定
アルゴリズム モデルから AUTOSAR ソフトウェア コンポーネント モデルを作成します。

Develop, Resize, and Calibrate Motors with Dynamometer Test Harness
Develop a control test bench, resize e-motors, and calibrate controllers using the motor dynamometer reference application.
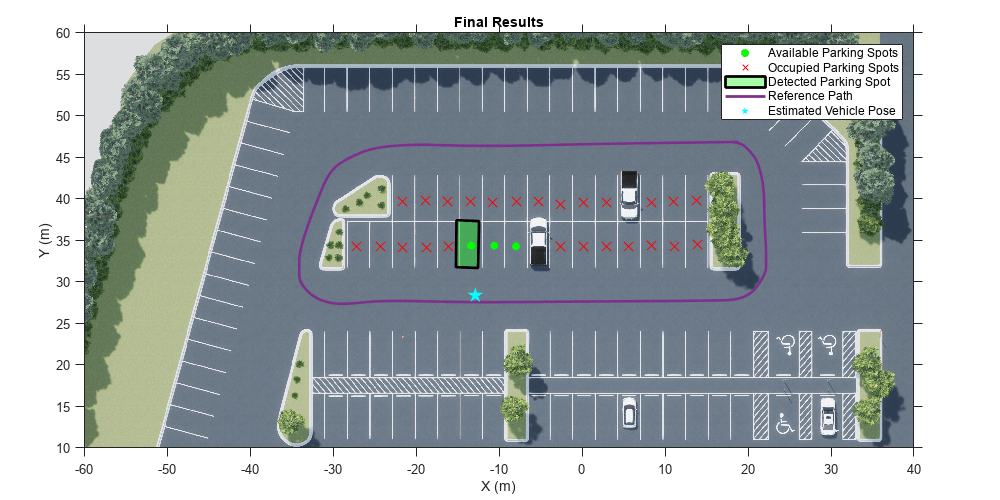
Perception Based Live Parking Spot Detection Using Unreal Engine Simulation
Develop a live parking spot detection system using deep learning and SLAM.

Traffic Signal Follower with RoadRunner Scenario
Design a traffic signal follower in Simulink and cosimulate it with RoadRunner Scenario.
ビデオ

Hybrid Electric Vehicles
モデルベース デザインを使用したハイブリッド電気自動車 (HEV) システムの開発について学習します。

Electric Vehicle Modeling: Powertrain, Battery, and Thermal Systems
電気自動車用のバッテリー パックを設計し、最適化します。

Develop ISO 26262-Compliant ADAS Applications with Model-Based Design
IEC Certification Kit を使用すると、ツール検定の機能安全要件に対応することができます。