idfrd
周波数応答データまたはモデル
説明
idfrd オブジェクトは、周波数値の範囲にわたる周波数応答データを格納します。idfrd オブジェクトは 2 つの方法で使用できます。iddata オブジェクトと同様に、時間領域モデルまたは周波数領域モデルを推定するための推定データとしてこのオブジェクトを使用できます。あるいは、idss 状態空間モデルや他の同定した線形モデルを使用する方法と同様に、線形モデルとしてこのオブジェクトを使用できます。idfrd コマンドを使用して、周波数応答データをカプセル化するか、線形の時間領域または周波数領域の動的モデルを周波数応答モデルに変換します。
モデル推定コマンド ssest など、iddata オブジェクトを受け入れるコマンドは通常、idfrd オブジェクトも受け入れます。ただし、idfrd オブジェクトには 1 つの実験からのデータのみを含めることができます。iddata オブジェクトが備えている複数実験機能はありません。
解析および検証コマンド compare、sim、bode など、同定された線形モデルを受け入れるコマンドは通常、idfrd モデルも受け入れます。
次の形式のモデルを考えます。
伝達関数推定は であり、出力の加法性ノイズ スペクトル Φv は次のとおりです。
ここで、λ は e(t) の推定分散、T はサンプル時間です。
連続時間システムでは、ノイズ スペクトルは次のとおりです。
idfrd オブジェクトは および Φv を格納します。
作成
idfrd モデルは 3 つの方法のいずれかで取得できます。
idfrdコマンドを使用して周波数応答データからモデルを作成する。たとえば、サンプル時間Tsを使用して特定の周波数で取得した周波数応答データをカプセル化するidfrdモデルを作成します。例については、周波数応答データからの idfrd オブジェクトの作成を参照してください。sysfr = idfrd(ResponseData,Freq,Ts)
時間領域データ、周波数領域データ、または周波数応答データを使用して、
spaなどの周波数応答推定コマンドを使用してモデルを推定する。sysfr = spa(data)
モデルの周波数応答を計算することで、
idssモデルのような線形モデルを、idfrdモデルに変換する。線形モデル変換の例については、周波数応答モデルへの時間領域モデルの変換を参照してください。sysfr = idfrd(sys)
idfrd モデル オブジェクトからの情報の抽出およびモデル オブジェクトの変換に使用できる関数の詳細については、オブジェクト関数を参照してください。
構文
説明
周波数応答オブジェクトの作成
sysfr = idfrd(ResponseData,Frequency,Ts)Frequency における線形システムの周波数応答 ResponseData を格納する離散時間 idfrd オブジェクトを作成します。Ts はサンプル時間です。連続時間システムでは、Ts を 0 に設定します。
sysfr = idfrd(___,Name,Value)sysfr = idfrd(ResponseData,Frequency,Ts,'FrequencyUnits','MHz') を使用します。
周波数応答モデルへの同定された線形モデルの変換
sysfr = idfrd(sys)
sysfr = idfrd(sys,Frequency,FrequencyUnits)FrequencyUnit で指定された単位で Frequency ベクトルの周波数を解釈します。
入力引数
プロパティ
オブジェクト関数
動的システム モデルに適用できる多くの関数は idfrd モデル オブジェクトにも適用できます。これらの関数は 3 つの一般的なタイプに分類されます。
chgTimeUnitやchgFreqUnitなど、idfrdモデル オブジェクトに対して操作を行い、結果のオブジェクトを返す関数getcovなど、モデル情報を取得または解釈する関数
他の同定された線形モデルとは異なり、idss や idtf などのコマンドを使用して idfrd モデルを別のモデル タイプに直接変換することはできません。代わりに、idfrd オブジェクトを推定データとして使用して、対象モデルの推定コマンドを使用します。たとえば、idfrd モデルの sysfr の周波数応答データから sys = ssest(sysfr,2) を使用して 2 次状態空間モデルを推定します。idfrd オブジェクトを推定データとして使用する例については、周波数応答データを使用した時間領域モデルの推定を参照してください。
以下のリストには、idss モデルで使用できる関数の代表的なサブセットが含まれています。
例
周波数応答データから idfrd オブジェクトを作成します。
振幅データ AMP、位相データ PHA、および周波数ベクトル W を読み込みます。サンプル時間 Ts を 0.1 に設定します。
load demofr AMP PHA W Ts = 0.1;
AMP および PHA の値を使用して、複素数値の応答 response を計算します。
response = AMP.*exp(1j*PHA*pi/180);
idfrd object を作成して、response を idfrd オブジェクトの frdata に格納します。
frdata = idfrd(response,W,Ts)
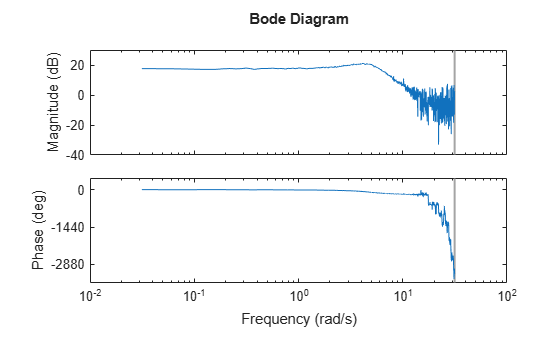
frdata = IDFRD model. Contains Frequency Response Data for 1 output(s) and 1 input(s). Response data is available at 1000 frequency points, ranging from 0.03142 rad/s to 31.42 rad/s. Sample time: 0.1 seconds Status: Created by direct construction or transformation. Not estimated. Model Properties
データをプロットします。
bode(frdata)
frdata は、ドット表記を使用してアクセスできるオブジェクト プロパティをもつ複素数オブジェクト idfrd です。たとえば、Ts の値を確認します。
tsproperty = frdata.Ts
tsproperty = 0.1000
プロパティ値を設定することもできます。Name プロパティを 'DC_Converter' に設定します。
frdata.Name = 'DC_Converter';frdata を System Identification アプリにインポートすると、アプリはこのデータに変数名 frdata ではなく DC_Converter という名前を付けます。
get を使用してプロパティ設定の完全なセットを取得します。
get(frdata)
FrequencyUnit: 'rad/TimeUnit'
Report: [1×1 idresults.frdest]
SpectrumData: []
CovarianceData: []
NoiseCovariance: []
InterSample: {'zoh'}
ResponseData: [1×1×1000 double]
IODelay: 0
InputDelay: 0
OutputDelay: 0
InputName: {''}
InputUnit: {''}
InputGroup: [1×1 struct]
OutputName: {''}
OutputUnit: {''}
OutputGroup: [1×1 struct]
Notes: [0×1 string]
UserData: []
Name: 'DC_Converter'
Ts: 0.1000
TimeUnit: 'seconds'
SamplingGrid: [1×1 struct]
Frequency: [1000×1 double]
idfrd コマンドを使用して状態空間モデルを周波数応答モデルに変換します。
データ z2 を読み込み、2 次状態空間モデル sys を推定します。
load iddata2 z2 sys = ssest(z2,2);
sys を idfrd モデルの frsys に変換します。
frsys = idfrd(sys)
frsys = IDFRD model. Contains Frequency Response Data for 1 output(s) and 1 input(s), and the spectra for disturbances at the outputs. Response data and disturbance spectra are available at 68 frequency points, ranging from 0.1 rad/s to 1000 rad/s. Output channels: 'y1' Input channels: 'u1' Status: Created by conversion from idss model. Model Properties
frsys をプロットします。
bode(frsys)
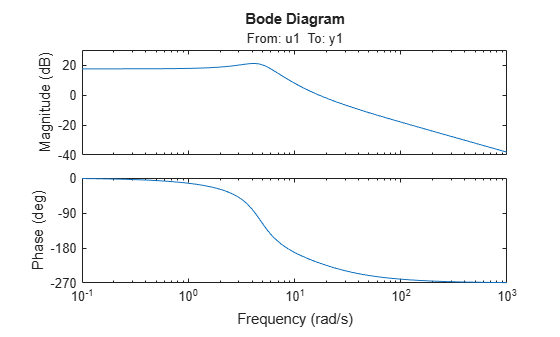
frsys は、動的システム モデルとして、もしくは時間領域モデルまたは周波数領域モデルの推定データとして使用できる idfrd モデルです。
伝達関数モデルの周波数応答を取得し、応答を idfrd オブジェクトに変換します。
1 つの零点と 3 つの極をもつ伝達関数モデルを構築します。
systf = idtf([1 .2],[1 2 1 1]);
bode を使用して、振幅と位相の観点から周波数ベクトル f について systf の周波数応答を取得します。
f = logspace(-1,1,100); [mag,phase] = bode(systf,f);
mag および phase の値を使用して、複素数値の応答 response を計算します。
response = mag.*exp(1j*phase*pi/180);
idfrd オブジェクトの frdata を作成して、response を格納します。サンプル レート Ts として 0.8 を指定します。
Ts = 0.8; frdata = idfrd(response,f,Ts)
frdata = IDFRD model. Contains Frequency Response Data for 1 output(s) and 1 input(s). Response data is available at 100 frequency points, ranging from 0.1 rad/s to 10 rad/s. Sample time: 0.8 seconds Status: Created by direct construction or transformation. Not estimated. Model Properties
データをプロットします。
bode(frdata)
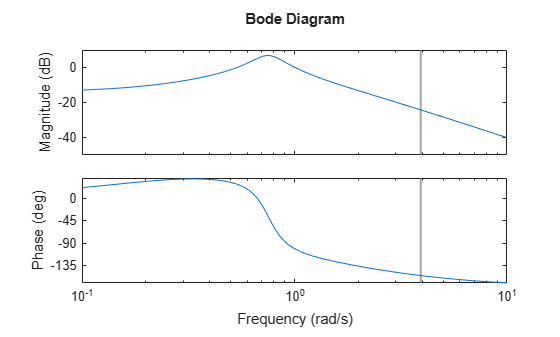
frdata は idfrd 複素数オブジェクトです。
時間領域データから伝達関数モデルを推定し、結果の idtf モデルを idfrd モデルに変換します。idfrd モデルの周波数応答データから新しい伝達関数モデルを推定します。モデルの応答を元のデータと比較します。
時間領域データ z2 を読み込み、そのデータを使用して 2 つの極と 1 つの零点を含む伝達関数 sys を推定します。
load iddata2 z2 sys = tfest(z2,2,1);
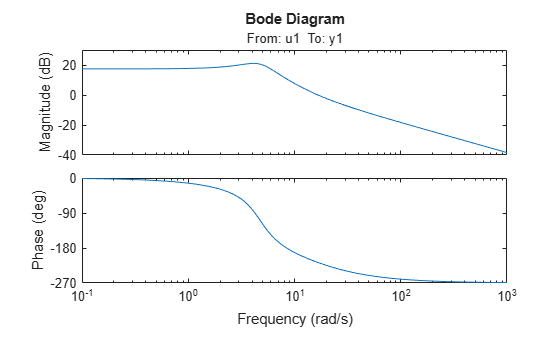
sys を idfrd モデルに変換し、周波数応答をプロットします。
frsys = idfrd(sys); bode(sys)
frsys からのデータを推定データとして使用して新しい伝達関数 sys1 を推定します。
sys1 = tfest(frsys,2,1);
sys および sys1 の応答を元の推定データ z2 と比較します。
compare(z2,sys,sys1)
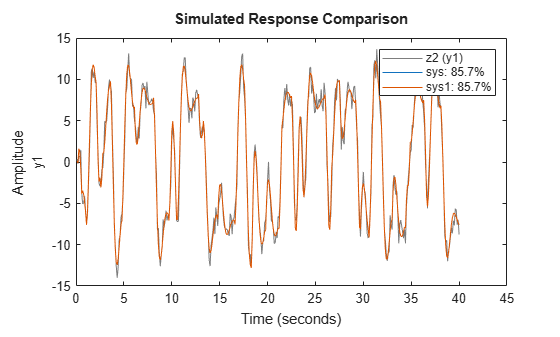
モデルの応答は一致します。
バージョン履歴
R2006a より前に導入