chgTimeUnit
動的システムの時間単位の変更
説明
sys_new = chgTimeUnit(sys,newtimeunits)sys の時間単位を newtimeunits に変更します。sys と sys_new の時間領域と周波数領域の特性は一致します。
例
伝達関数モデルを作成します。
num = [4 2]; den = [1 3 10]; sys = tf(num,den);
既定では、sys の時間単位は 'seconds' です。この時間単位を分に変更した新しいモデルを作成します。
sys1 = chgTimeUnit(sys,'minutes');このコマンドは、ダイナミクスを変更することなく、sys1 の TimeUnit プロパティを 'minutes' に設定します。ダイナミクスが変更されていないことを確認するには、sys と sys1 のステップ応答を比較します。
stepplot(sys,'r',sys1,'y--'); legend('sys','sys1');
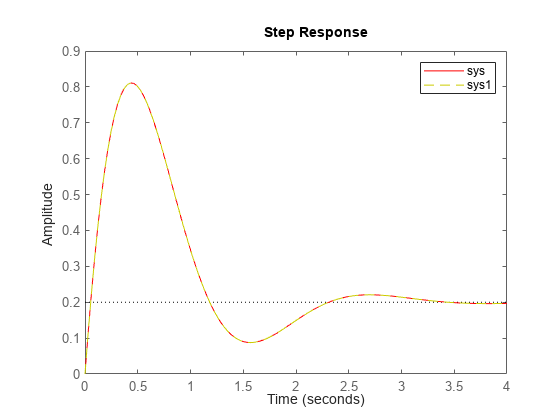
ステップ応答は同一になります。
chgTimeUnit を使用せずにシステムの TimeUnit プロパティを変更すると、システムのダイナミクスが変更されます。これを確認するには、sys のコピーの TimeUnit プロパティを変更して、元のシステムとステップ応答を比較します。
sys2 = sys; sys2.TimeUnit = 'minutes'; stepplot(sys,'r',sys2,'gx'); legend('sys','sys2');
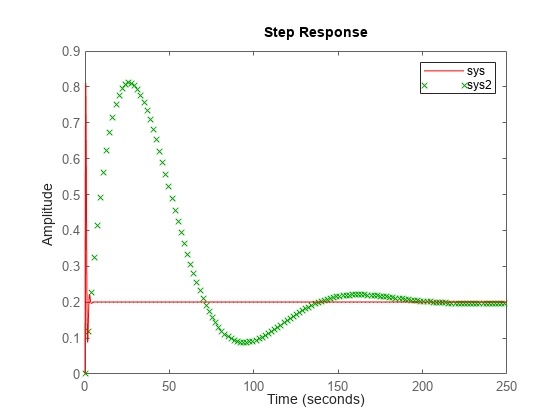
sys と sys2 のステップ応答は一致しません。たとえば、元の立ち上がり時間である 0.04 秒は 0.04 分に変更されます。
入力引数
出力引数
バージョン履歴
R2012a で導入