compare
同定されたモデル出力を測定出力と比較する
構文
説明
シミュレートされた出力および測定出力のプロット
compare( は、単一の動的システム モデル data,sys)sys または動的システム モデルの配列の応答をシミュレートし、data に含まれている入出力測定データのプロットの上に各モデルの応答を重ね合わせます。data は timetable、コンマ区切りの入出力行列ペア、またはデータ オブジェクト (iddata オブジェクトや idfrd オブジェクトなど) にすることができます。
プロットでは、シミュレートされた応答と出力測定データ間の適合度を示す、正規化された平方根平均二乗 (NRMSE) の測定値も表示されます。
この関数を使用するのは、単一のモデルを検証する場合、または同じ測定データから同定された一連のモデル候補を評価する場合です。
timetable およびデータ オブジェクトの場合、compare は、sys 内のチャネル名に基づいて入出力チャネルを突き合わせ、一致しないチャネルを無視します。
モデルの出力の予測
compare(___, は、kstep)kstep で指定した予測範囲を使用して sys の応答を予測します。予測では出力測定値および入力測定値を使用して将来の応答を予想します。kstep は各出力測定値の時間点と結果の予測応答の時間点間の時間サンプルの数を表します。
予測の詳細については、Simulate and Predict Identified Model Outputを参照してください。この構文は、前述の任意の入出力の組み合わせで使用できます。
例
線形モデルを同定し、生成元のデータを使用して、シミュレートされたモデル応答を可視化します。
tt1 の入出力測定値を読み込み、3 次状態空間モデル sys を同定します。
load sdata1 tt1; sys = ssest(tt1,3);
sys は、連続時間で同定された状態空間 (idss) モデルです。
compare を使用して sys 応答をシミュレートし、tt1 のデータと一緒にプロットします。
figure compare(tt1,sys)
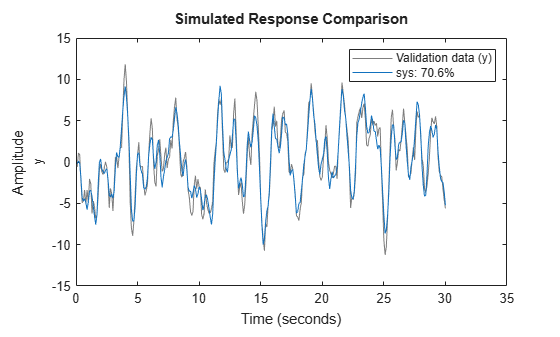
プロットでは、モデル応答と元のデータの差が示されます。凡例に示されているパーセントは NRMSE 適合値です。これは、予測モデル出力とデータの一致度を表します。
プロットの表示オプションを変更するには、プロットを右クリックしてコンテキスト メニューにアクセスします。以下に例を示します。
予測出力と測定出力間の誤差をプロットするには、[誤差プロット] を選択します。
シミュレートした応答の信頼領域を表示するには、[特性]、[信頼領域] を選択します。
プロットする標準偏差の数を指定するには、[プロパティ エディター] ダイアログ ボックスを開きます。[オプション] タブで、[同定されたモデルの信頼領域] に標準偏差の数を指定します。既定値は
1標準偏差です。
線形モデルを同定し、計算元のデータを使用して、予測モデル応答を可視化します。
umat1 および ymat1 の入出力測定値を使用して、3 次状態空間モデルを同定します。
load sdata1 umat1 ymat1 Ts sys = ssest(umat1,ymat1,3,'Ts',Ts);
sys は、離散時間で同定された状態空間 (idss) モデルです。
今度は、compare を使用して予測応答をプロットします。予測は、システム応答の計算時に測定入力と測定出力の両方を使用する点でシミュレーションと異なります。予測範囲は、現在の測定出力点を基準としてどのくらい先の未来まで予測するのかを定義します。この例では、予測範囲 kstep を 10 ステップに設定し、compare を使用して元の測定データに対して予測応答をプロットします。
kstep = 10; compare(umat1,ymat1,sys,kstep)
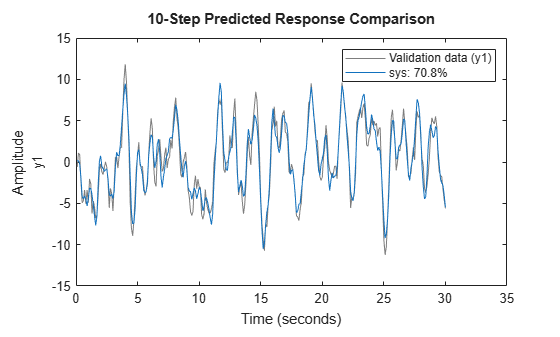
このプロットでは、各 sys データ点は、10 ステップ以上前に取られた出力測定データに関連した予測出力を表します。たとえば、t = 15s の点は、t = 5s 以前に取られた出力測定値に基づいています。この t = 15s の sys データ点の計算では、シミュレーションと同様に t = 15s までの入力測定値も使用します。
プロットでは、モデル応答と元のデータの差が示されます。凡例に示されているパーセントは NRMSE 適合値です。これは、予測モデルの出力とデータの一致度を表します。
プロットの表示オプションおよびシミュレーション オプションを変更するには、プロットを右クリックしてコンテキスト メニューにアクセスします。たとえば、予測出力と測定出力間の誤差をプロットするには、コンテキスト メニューから [誤差プロット] を選択します。予測範囲の値を変更する場合、またはシミュレーションと予測を切り替える場合は、コンテキスト メニューから [予測範囲] を選択します。
同じデータの複数のモデル タイプを同定し、結果を比較してデータに最も適合するモデル タイプを確認します。
単一の入出力が含まれている iddata オブジェクトの z1 を含むデータを読み込みます。
load iddata1;z1 から、以下の各線形形式のモデルを同定します。
デッド タイムが 0 の、次数 2、3、および 1 の ARMAX (
idpoly)3 つの状態をもつ状態空間 (
idss)3 つの極をもつ伝達関数 (
idtf)
sys_armax = armax(z1,[2 3 1 0]); sys_ss = ssest(z1,3); sys_tf = tfest(z1,3);
compare によって z1 を使用して 3 つのモデルのシミュレートされた応答をプロットします。
compare(z1,sys_armax,sys_ss,sys_tf)
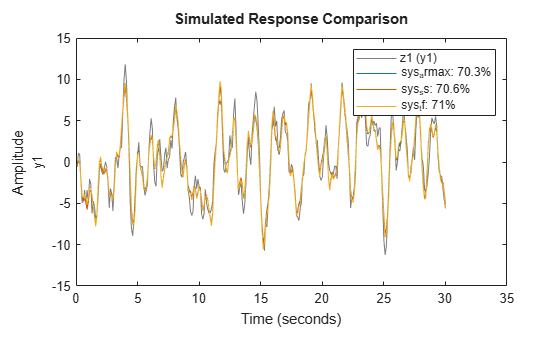
この一連のデータでは、すべてのモデルの既定の設定とともに使用して、伝達関数形式の NRMSE 適合度が最良になっています。ただし、どのモデル同士の適合度の差も約 1% 以内に収まっています。
プロットを右クリックし、[システム] の上にカーソルを合わせることで、プロットに表示されるモデル応答を対話的に制御できます。
異なるタイプの複数の推定モデルの出力を測定周波数領域データと比較します。
この例では、周波数応答データからプロセス モデルおよび出力誤差多項式を推定します。
load demofr % frequency response data zfr = AMP.*exp(1i*PHA*pi/180); Ts = 0.1; data = idfrd(zfr,W,Ts); sys1 = procest(data,'P2UDZ'); sys2 = oe(data,[2 2 1]);
idproc モデルの sys1 は連続時間プロセス モデルです。idpoly モデルの sys2 は離散時間出力誤差モデルです。
推定モデルの周波数応答をデータと比較します。
compare(data,sys1,'g',sys2,'r');

2 つのモデルの NRMSE 適合値は、計算元のデータを基準としてほぼ同等です。
推定モデルを測定データと比較する際の既定の動作を変更します。
測定データの伝達関数を推定します。
load sdata1 tt1; sys = tfest(tt1,3);
sys は、連続時間で同定された伝達関数 (idtf) モデルです。
初期条件をゼロにするとします。compare の既定ではデータから初期条件を推定します。
初期条件処理を指定するオプション セットを作成します。初期条件でゼロを使用するには、'InitialCondition' オプションに 'z' を指定します。
opt = compareOptions('InitialCondition','z');
比較オプション セットを使用して、推定された伝達関数モデルの出力を測定データと比較します。
compare(tt1,sys,opt)

データを読み込みます。
load iddata2 z2
データを推定セットと検証セットに分けます。
z2e = z2(1:200); z2v = z2(201:400); idplot(z2e,z2v)

推定データを使用して状態空間モデルおよび伝達関数モデルを推定します。
sys_ss = ssest(z2e,2); sys_tf = tfest(z2e,2,1);
compare を使用して sys_ss の初期条件 ic_ss を取得します。
[y_ss,fit_ss,ic_ss] = compare(z2e,sys_ss); ic_ss
ic_ss = 2×1
-0.0018
0.0016
ic_ss は初期状態の数値ベクトルです。
compare を使用して sys_tf の初期条件 ic_tf を取得します。
[y_tf,fit_tf,ic_tf] = compare(z2e,sys_tf); ic_tf
ic_tf =
initialCondition with properties:
A: [2×2 double]
X0: [2×1 double]
C: [-1.6093 5.1442]
Ts: 0
ic_tf は、状態空間形式で初期条件に対する sys_tf の自由応答のモデルを含む initialCondition オブジェクトです。A および C には自由応答情報が含まれ、X0 には初期状態が含まれます。
ここで、検証データを使用して両方のモデルの初期条件を同時に取得します。
[y_sstf,fit_sstf,ic_sstf] = compare(z2v,sys_ss,sys_tf); ic_sstf
ic_sstf=2×1 cell array
{2×1 double }
{1×1 initialCondition}
ic_sstf は、sys_ss の初期状態ベクトルおよび sys_tf の initialCondition オブジェクトを含む cell 配列です。
compare は、任意の測定データ セットを使用して既存のモデルの初期条件を提供できます。
入力引数
出力引数
ヒント
compareで取得した NRMSE 適合結果は、モデル同定でレポートされた適合値に正確に一致しないことがあります。この差は通常、初期条件の不一致、および同定用と検証用の予測範囲の既定値の差が原因で生じます。差は通常小さいため、モデルの選択および検証のワークフローに影響しません。詳細については、Resolve Fit Value Differences Between Model Identification and compare Commandを参照してください。compareは、チャネル名に基づいてdataおよびsysの入出力チャネルを突き合わせます。したがって、dataで使用可能なすべての入力チャネルを使用しないモデルを評価できます。この柔軟性により、異なる一連の入出力チャネルからそれぞれが独立して同定された複数のモデルを比較できます。compareのプロットでは、主要なパラメーターを変更できます。たとえば、以下を対話的に制御できます。シミュレートされた応答または予測応答のいずれを生成するのか
予測範囲値
初期条件処理
表示する実験データ
表示するシステム モデル
制御にアクセスするには、プロットを右クリックしてオプション メニューを表示します。