predict
同定されたモデルの K ステップ先の出力の予測
構文
説明
この predict コマンドは、測定された入出力データを使用して、同定されたモデルの K ステップ先の出力を計算します。モデルを同定するには、先にすべての入出力データを収集してから、オフラインでモデル パラメーターを推定します。リアルタイムのデータを使用して非線形システムのオンライン状態推定を実行するには、代わりに拡張カルマン フィルターとアンセンテッド カルマン フィルター用の predict コマンドを使用します。
例
時系列データをシミュレートします。
init_sys = idpoly([1 -0.99],[],[1 -1 0.2]);
opt = simOptions('AddNoise',true);
u = iddata([],zeros(400,0),1);
data = sim(init_sys,u,opt);data は、時系列モデルのシミュレーション応答データを含む iddata オブジェクトです。
data を推定データとして使用して ARMAX モデルを推定します。
na = 1; nb = 2; sys = armax(data(1:200),[na nb]);
予測範囲 4 を使用してモデルの出力を予測します。
K = 4; yp = predict(sys,data,K);
yp は iddata オブジェクトです。予測出力はオブジェクトの OutputData プロパティで返されます。
予測データと推定データの出力を比較します。
plot(data(201:400),yp(201:400)); legend('Estimation data','Predicted data');
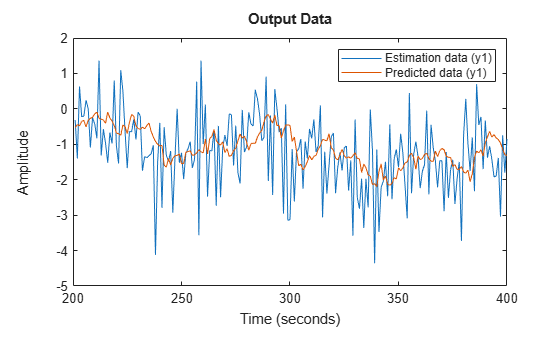
あるいは、予測応答と推定データをプロットするには compare(sys,data,K) を使用します。
推定データを読み込みます。
load sdata1 tt1; data = tt1;
次数 [2 2 1] の ARX モデルを推定します。
sys1 = arx(data,[2 2 1]);
2 つの極をもつ伝達関数を推定します。
sys2 = tfest(data,2);
predict オプション セットを作成し、予測に対してゼロの初期条件を指定します。
opt = predictOptions('InitialCondition','z');
推定モデルの予測出力をプロットします。指定した予測オプション セット opt を使用し、予測範囲を 10 と指定します。各システムの予測出力をプロットするライン スタイルを指定します。
predict(sys1,'r--',sys2,'b',data,10,opt);
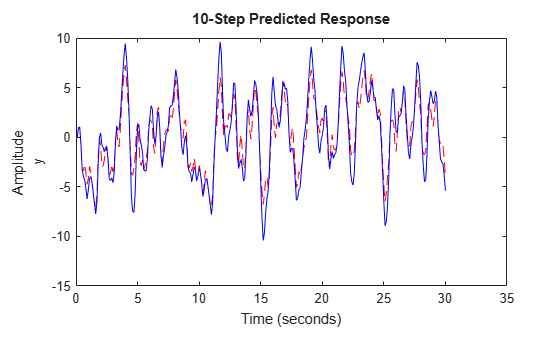
表示オプションを変更するには、プロットを右クリックしてコンテキスト メニューにアクセスします。たとえば、推定データを表示するには、コンテキスト メニューから [検証データの表示] を選択します。予測誤差を表示するには、[予測誤差プロット] を選択します。
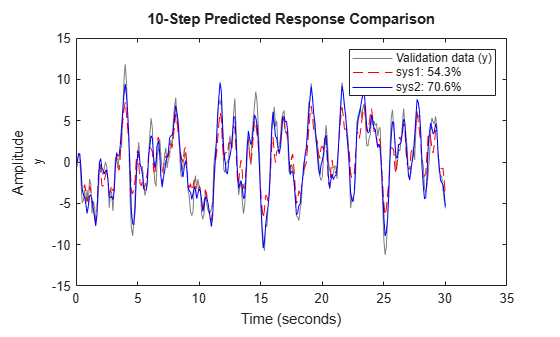
予測応答は compare コマンドを使用してプロットすることもできます。そのためには、まず compare のオプション セットを作成し、ゼロの初期条件を使用するように指定します。
opt = compareOptions('InitialCondition','z'); compare(data,sys1,'r--',sys2,'b',10,opt);
推定データを使用してモデルを推定してから、predict コマンドを使用して予測モデル出力と予測子モデルを計算します。予測子モデルをシミュレートして予測出力を再現します。
推定データを読み込みます。
load sdata3 umat3 ymat3 Ts
データから多項式モデルを推定します。
sys = polyest(umat3,ymat3,[2 2 2 0 0 1]);
予測範囲 4 を使用してシステム応答を予測します。
K = 4; [yp,ic,sysp] = predict(sys,umat3,ymat3,K);
yp は予測モデル応答で、ic には推定初期条件が格納され、sysp は予測子モデルです。
入力 [data.OutputData,data.InputData] と初期条件 ic で予測子モデルをシミュレートします。
opt = simOptions; opt.InitialCondition = ic; ys = sim(sysp,[ymat3,umat3],opt);
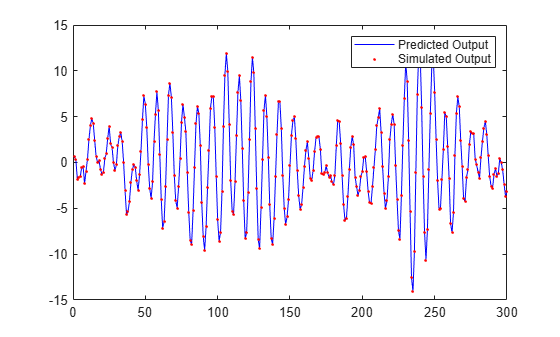
予測出力とシミュレーション出力をプロットします。
ns = size(ys,1); t = [1:Ts:ns]'; plot(t,yp,'b',t,ys,'.r'); legend('Predicted Output','Simulated Output')
前に取得した初期条件をモデル予測に組み込みます。
データを読み込みます。
load iddata1ic z1i
ARMAX 推定オプションを指定して初期状態を推定します。
estimOpt = armaxOptions('InitialCondition','estimate');
ARMAX モデルを推定し、初期条件が状態空間形式でカプセル化された initialCondition オブジェクト ic を返します。
na = 2; nb = 2; nc = 2; nk = 1; [sys,ic] = armax(z1i,[na nb nc nk],estimOpt);
予測の初期条件を指定します。
predictOpt = predictOptions('InitialCondition',ic);モデルを予測し、モデル応答を取得します。応答 y を測定データと共にプロットします。
y = predict(sys,z1i,predictOpt); plot(z1i,y) legend("show",Interpreter="none")
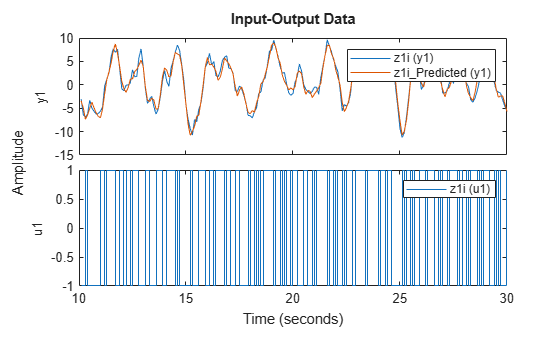
予測の開始時点で測定と予測の応答がよく一致しています。
履歴データで初期条件を指定してモデル予測を実行します。最初に predict コマンドを使用して予測し、predictOptions オプション セットを使用して履歴データを指定します。その後、履歴データを初期状態に手動でマッピングして予測応答を再現します。
2 入力 1 出力のデータセットを読み込みます。
load iddata7 z7
データを使用して 5 次状態空間モデルを同定します。
sys = n4sid(z7,5);
データセットを 2 つの部分に分けます。
zA = z7(1:15); zB = z7(16:end);
データ zB に対する同定システムの応答の 10 ステップ先の予測を計算するとします。初期条件で、zA の信号値を履歴レコードとして使用します。つまり、zB のすぐ前の時点におけるデータの入力値と出力値です。
IO = struct('Input',zA.InputData,'Output',zA.OutputData); opt = predictOptions('InitialCondition',IO);
指定した初期条件と predict を使用して、データ zB の 10 ステップ先の予測を生成します。
[yp,x0,Predictor] = predict(sys,zB,10,opt);
yp は予測モデル応答、x0 は予測子モデル Predictor に対応する初期状態です。x0 を初期条件として使用して Predictor をシミュレートすることで yp.OutputData を再現できます。
次に、履歴データを初期状態に手動でマッピングして出力を再現します。そのためには、zA の時間範囲における 1 ステップの予測誤差を最小化します。
x0est = data2state(sys,zA);
x0est には、zA の最新のデータ サンプルのすぐ後の時点における sys の 5 つの状態の値が含まれています。
10 ステップの予測範囲により、Predictor には元のシステムよりも多くの状態が含まれます。範囲に起因する追加の状態をゼロの初期値に指定してから x0est を追加します。
x0Predictor = zeros(order(Predictor),1); x0Predictor(end-4:end) = x0est;
[zB.OutputData,zB.InputData] を入力信号、x0Predictor を初期条件として使用して予測子をシミュレートします。
uData = [zB.OutputData,zB.InputData]; % signals required for prediction
[ysim,t,xsim] = lsim(Predictor,uData,[],x0Predictor);predict コマンドの予測出力 yp.OutputData と手動による計算結果 ysim をプロットします。
plot(t,yp.OutputData,t,ysim, '.')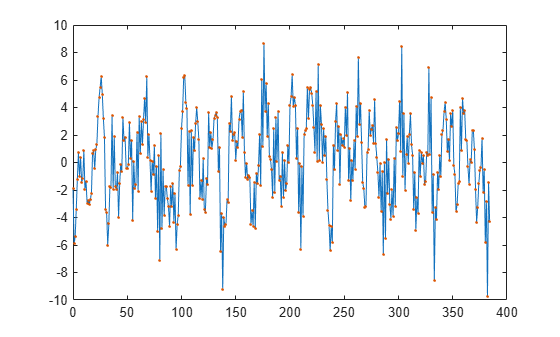
ysim は yp.OutputData と同じです。
入力引数
出力引数
ヒント
予測出力のプロットを右クリックするとコンテキスト メニューが開き、次のオプションにアクセスできます。
システム — 予測応答を表示するシステムを選択します。既定では、すべてのシステムの応答がプロットされます。
データ実験 — 複数実験データの場合のみ。別の実験のデータに切り替えます。
特性 — 次のデータ特性を表示します。
ピーク値 — データの絶対ピーク値を表示します。時間領域データにのみ適用できます。
ピーク応答 — データのピーク応答を表示します。周波数応答データにのみ適用できます。
平均値 — データの平均値を表示します。時間領域データにのみ適用できます。
表示 — 周波数領域データと周波数応答データの場合のみ。
振幅 — システムの周波数応答の振幅を表示します。
位相 — システムの周波数応答の位相を表示します。
検証データの表示 — モデル応答の予測に使用されたデータをプロットします。
I/O のグループ化 — 複数の入力チャネルまたは出力チャネルを含むデータセットの場合。プロットにおける入力チャネルおよび出力チャネルのグループ化を選択します。
なし — 入出力チャネルをそれぞれ別々の座標軸にプロットします。
すべて — すべての入力チャネルをグループ化し、すべての出力チャネルをグループ化します。
I/O セレクター — 複数の入力チャネルまたは出力チャネルを含むデータセットの場合。プロットする入力チャネルと出力チャネルのサブセットを選択します。既定では、すべての出力チャネルがプロットされます。
グリッド — プロットにグリッドを追加します。
正規化 — プロット内のすべてのデータの y スケールを正規化します。
フル ビュー — フル ビューに戻ります。既定では、プロットはフル ビューにスケーリングされます。
予測範囲 — 予測範囲を設定するか、シミュレーションを選択します。
初期条件 — 初期条件の処理を指定します。周波数応答データには適用されません。
次のいずれかとして指定します。
推定 — 初期条件を推定パラメーターとして扱います。
ゼロ — すべての初期条件をゼロに設定します。
遅延を吸収して推定 — 非ゼロの遅延をモデルの係数に吸収し、初期条件を推定パラメーターとして扱います。このオプションは、離散時間モデルにのみ使用します。
予測応答プロット — 予測モデル応答をプロットします。既定では、応答プロットが表示されます。
予測誤差プロット — モデル応答と予測データの間の誤差をプロットします。
プロパティ — プロットの属性をカスタマイズするための [プロパティ エディター] ダイアログ ボックスを開きます。