armax
時間領域データを使用して ARMAX、ARIMAX、ARMA、または ARIMA モデルのパラメーターを推定する
構文
説明
ARMAX または ARMA モデルの推定
sys = armax(tt,[na nb nc nk])tt の変数に含まれるデータを使用して、ARMAX モデルまたは ARMA idpoly モデル sys のパラメーターを推定します。最初の Nu 個の変数が入力として使用され、次の Ny 個の変数が出力として使用されます。Nu と Ny はそれぞれ nb と na の次元から決定されます。
ARMA モデルの場合は、入力信号がないため、sys = armax(tt,na) を使用します。この場合は、最初の Ny 個の変数を使用してモデルが適合されます。
armax は、予測誤差法と、[na nb nc nk] で指定された多項式の次数を使用して推定を行います。モデルのプロパティには、推定の共分散 (パラメーターの不確かさ)、および推定データと測定データとの適合度が含まれます。
tt から特定の入力チャネルと出力チャネルを選択するには、名前と値の構文を使用して 'InputName' と 'OutputName' を対応する timetable 変数名に設定します。
sys = armax(u,y,[na nb nc nk])u,y 内の時間領域入力信号と出力信号を使用します。データのサンプル時間は 1 秒と仮定されます。サンプル時間を変更するには、名前と値の構文を使用して Ts を設定します。
sys = armax(data,[na nb nc nk])iddata オブジェクト data 内の時間領域データを使用します。この構文は特に、データ オブジェクトが提供する追加情報 (データのサンプル時間、実験のラベル付けなど) を利用する場合に使用します。
sys = armax(___,Name,Value)'IntegrateNoise',1 は、非定常外乱があるシステムに役立つ ARIMAX または ARIMA モデルを推定します。Name,Value は、前述の任意の入力引数の組み合わせの後に指定します。
初期パラメーターの構成
追加の推定オプションの指定
推定される初期条件を返す
[ は、推定される初期条件を sys,ic] = armax(___)initialCondition オブジェクトとして返します。この構文は、モデルの応答を同じ推定入力データを使用してシミュレートまたは予測し、その応答を同じ推定出力データと比較する場合に使用します。初期条件を組み込むことで、シミュレーションの最初の部分における一致が高まります。
例
ARMAX モデルを推定し、推定データに対するモデル出力の適合を確認します。
timetable tt2 に測定データを読み込みます。
load sdata2 tt2
2 次 、、および 多項式、および 1 つのサンプル周期の伝達遅延で ARMAX モデルを推定します。
na = 2; nb = 2; nc = 2; nk = 1; sys = armax(tt2,[na nb nc nk])
sys =
Discrete-time ARMAX model: A(z)y(t) = B(z)u(t) + C(z)e(t)
A(z) = 1 - 1.512 z^-1 + 0.7006 z^-2
B(z) = -0.2606 z^-1 + 1.664 z^-2
C(z) = 1 - 1.604 z^-1 + 0.7504 z^-2
Sample time: 0.1 seconds
Parameterization:
Polynomial orders: na=2 nb=2 nc=2 nk=1
Number of free coefficients: 6
Use "polydata", "getpvec", "getcov" for parameters and their uncertainties.
Status:
Estimated using ARMAX on time domain data "tt2".
Fit to estimation data: 85.89% (prediction focus)
FPE: 1.086, MSE: 1.054
Model Properties
出力には、推定の詳細と一緒に、推定パラメーターを含む多項式が表示されます。Status の下の Fit to estimation data から、推定モデルの 1 ステップ先の予測精度が 80% を超えていることがわかります。
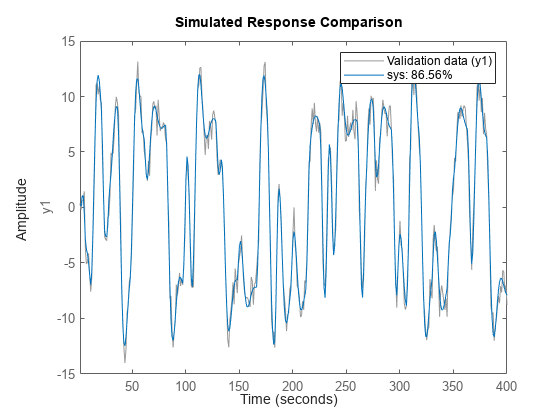
モデルのシミュレーション出力と測定されたデータを比較します。
compare(tt2,sys)
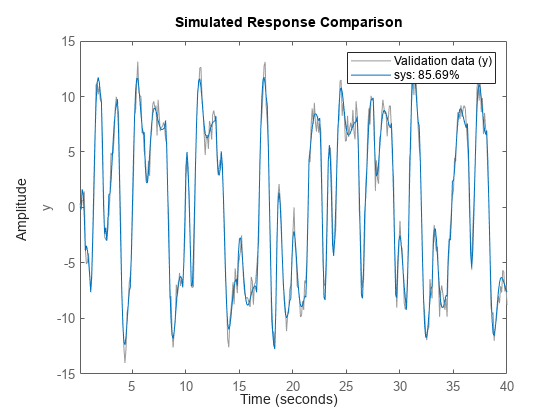
測定されたデータに対するシミュレートされたモデルの適合度は、推定の適合度とほぼ同じです。
ARMA モデルを推定し、その応答を測定出力および AR モデルの両方と比較します。
ノイズがある時系列 ymat9 を含むデータを読み込みます。
load sdata9 ymat9
1 次 多項式で 4 次 ARMA モデルを推定します。
na = 4; nc = 1; sys = armax(ymat9,[na nc]);
4 次 AR モデルを推定します。
sys_ar = ar(ymat9,na);
モデル出力と測定されたデータを比較します。
compare(ymat9,sys,sys_ar)
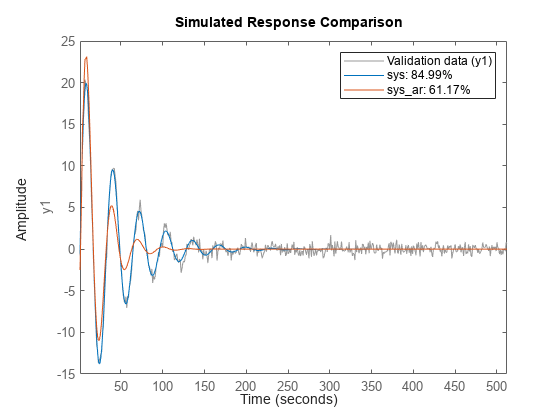
ARMA モデルの方がデータに適合します。
測定されたデータから ARMAX モデルを推定し、推定オプションを指定します。
データを読み込み、iddata オブジェクトを作成します。オプション セット opt を初期化し、Focus、SearchMethod、MaxIterations、および Display のオプションを設定します。更新したオプション セットを使用して、ARMAX モデルを推定します。
load twotankdata; z = iddata(y,u,0.2); opt = armaxOptions; opt.Focus = 'simulation'; opt.SearchMethod = 'lm'; opt.SearchOptions.MaxIterations = 10; opt.Display = 'on'; sys = armax(z,[2 2 2 1],opt);
進捗状況ビューアーに表示されるモデルの測定成分の終了条件は、最大反復回数に到達することです。
結果を改善するには、MaxIterations の大きい方の値を使用してモデルを再度推定するか、以下のように以前に推定されたモデルで反復を続行します。
sys2 = armax(z,sys); compare(z,sys,sys2)
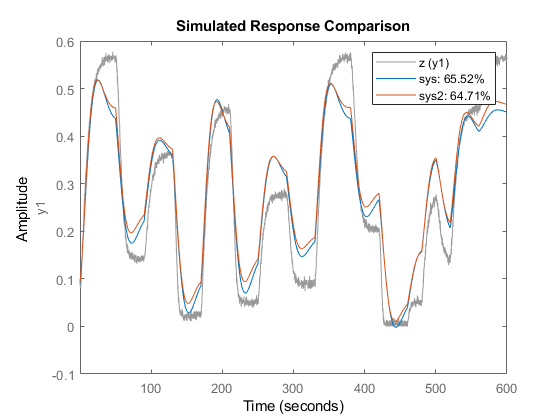
sys2 は sys のパラメーターを調整して、データへの適合度を高めます。
正則化された ARX モデルを変換して、正則化された ARMAX モデルを推定します。
データを読み込みます。
load regularizationExampleData.mat m0simdata;
次数 30 の正則化されていない ARMAX モデルを推定します。
m1 = armax(m0simdata(1:150),[30 30 30 1]);
試行錯誤により Lambda 値を決定して、正則化された ARMAX モデルを推定します。
opt = armaxOptions; opt.Regularization.Lambda = 1; m2 = armax(m0simdata(1:150),[30 30 30 1],opt);
正則化された ARX モデルを変換した後に、次数の低次元化を実行して、低次の ARMAX モデルを取得します。
opt1 = arxOptions; [L,R] = arxRegul(m0simdata(1:150),[30 30 1]); opt1.Regularization.Lambda = L; opt1.Regularization.R = R; m0 = arx(m0simdata(1:150),[30 30 1],opt1); mr = idpoly(balred(idss(m0),7));
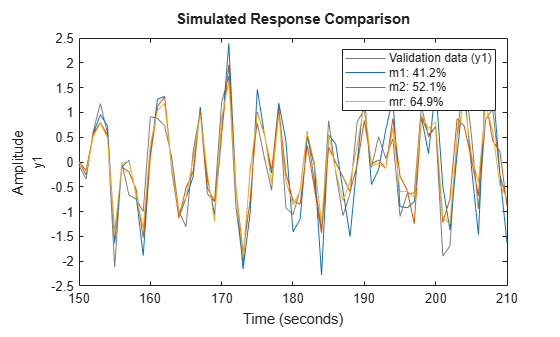
モデルの出力をデータと比較します。
opt2 = compareOptions('InitialCondition','z'); compare(m0simdata(150:end),m1,m2,mr,opt2);
一変量時系列データの 4 次 ARIMA モデルを推定します。
ノイズがある時系列を含むデータを読み込みます。
load iddata9 z9;
出力信号を積分し、結果を使用して z9 の元の出力信号を置換します。
z9.y = cumsum(z9.y);
'IntegrateNoise を true に設定して、1 次 多項式で 4 次 ARIMA モデルを推定します。
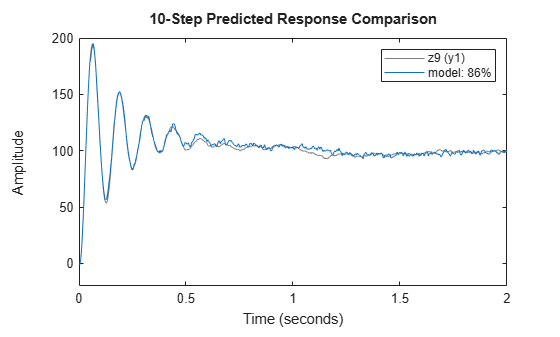
model = armax(z9,[4 1],'IntegrateNoise',true); 10 ステップ先の予測を使用してモデルの出力を予測し、予測された出力を推定データと比較します。
compare(z9,model,10)
測定データから、さまざまな次数の ARMAX モデルを繰り返し推定します。
dryer2 データを読み込み、多項式の次数 na、nb、nc、および入力遅延 nk の組み合わせに対して推定を行います。
load dryer2; z = iddata(y2,u2,0.08,'Tstart',0); na = 2:4; nc = 1:2; nk = 0:2; models = cell(1,18); ct = 1; for i = 1:3 na_ = na(i); nb_ = na_; for j = 1:2 nc_ = nc(j); for k = 1:3 nk_ = nk(k); models{ct} = armax(z,[na_ nb_ nc_ nk_]); ct = ct+1; end end end
推定されたモデルをスタックし、シミュレートされた応答を推定データ z と比較します。
models = stack(1,models{:});
compare(z,models)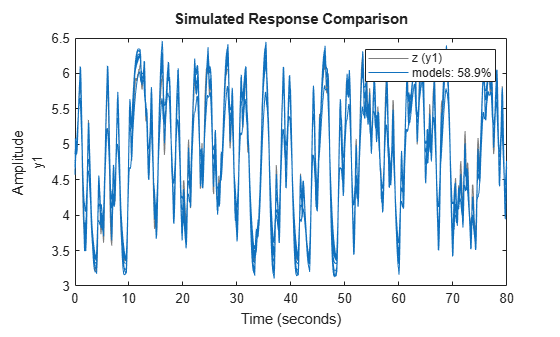
推定データを読み込みます。
load sdata2 umat2 ymat2
推定データから次数 3 の状態空間モデルを推定します。
sys0 = n4sid(umat2,ymat2,3);
以前推定した状態空間モデルを使用して ARMAX モデルを推定することにより、パラメーターを初期化します。
sys = armax(umat2,ymat2,sys0); compare(umat2,ymat2,sys)
データを読み込みます。
load iddata1ic z1i
2 次 ARMAX モデル sys を推定し、ic で初期条件を返します。
na = 2; nb = 2; nc = 2; nk = 1; [sys,ic] = armax(z1i,[na nb nc nk]); ic
ic =
initialCondition with properties:
A: [2×2 double]
X0: [2×1 double]
C: [0 1]
Ts: 0.1000
ic は、sys の自由応答を状態空間形式で X0 の初期状態ベクトルにカプセル化する initialCondition オブジェクトです。ic は、sys を z1i 入力信号でシミュレートし、その応答を z1i 出力信号と比較する場合に組み込むことができます。
入力引数
名前と値の引数
出力引数
詳細
アルゴリズム
反復探索アルゴリズムは、ロバスト化した二次予測誤差基準を最小化します。以下のいずれかに該当する場合、反復が終了します。
最大反復回数に達した。
期待改善量が、指定された許容誤差よりも小さい。
基準の下限値が見つからない。
sys.Report.Termination を使用して、停止条件に関する情報を取得できます。
armaxOptions オプション セットを使用して、推定結果に影響を与えるオプションを作成および構成します。特に、'SearchOptions' プロパティを使用して、MaxIterations や Tolerance などの探索アルゴリズム属性を設定します。
反復探索の初期パラメーター値を初期モデルとして指定しない場合、それらの値は特殊な 4 段階 LS-IV アルゴリズムで作成されます。
ロバスト化のカットオフ値は、Advanced.ErrorThreshold 推定オプションと、初期パラメーター推定値の残差の推定標準偏差に基づきます。カットオフ値は、最小化中に再計算されません。既定では、ロバスト化は実行されません。ErrorThreshold オプションの既定値は 0 です。
安定した予測子に対応するモデルのみテストされるように、アルゴリズムは予測子の安定性テストを実行します。一般的に、 と (該当する場合) の両方が、単位円の内側にすべての零点をもたなければなりません。
最小化の情報は、推定オプション 'Display' が 'On' または 'Full' である場合に画面に表示されます。'Display' が 'Full' の場合、現在のパラメーター推定値と前のパラメーター推定値の両方が列ベクトルの形式で表示され、パラメーターはアルファベット順に表示されます。また、基準関数 (コスト) の値が与えられ、ガウス・ニュートン ベクトルとそのノルムが表示されます。'Display' が 'On' の場合、基準値のみが表示されます。
代替方法
armax は、連続時間モデルの推定をサポートしません。tfest を使用して連続時間伝達関数モデルを推定するか、ssest を使用して連続時間状態空間モデルを推定します。
armax は時間領域データのみサポートします。周波数領域データの場合は、oe を使用して出力誤差 (OE) モデルを推定します。
参照
[1] Ljung, L. System Identification: Theory for the User, Second Edition. Upper Saddle River, NJ: Prentice-Hall PTR, 1999. See chapter about computing the estimate.