oe
時間領域または周波数領域のデータを使用して出力誤差の多項式モデルを推定する
構文
説明
出力誤差 (OE) モデルは多項式モデルの特殊構成であり、アクティブな多項式は 2 つしかありません (B と F)。OE モデルは、測定された入力を出力に関連付ける一方で、加法性出力外乱としてホワイト ノイズも含める従来型の伝達関数を表します。時間領域データと周波数領域データを使用して、OE モデルを推定できます。tfest コマンドが oe と同じ機能を提供します。tfest では、多項式の次数ではなく、極と零点の数を使用してモデル次数を指定します。連続時間推定では、tfest の方が高速で正確な結果が得られるため推奨されます。
OE モデルの推定
sys = oe(tt,[nb nf nk])tt の変数に含まれるデータを使用して、OE モデル sys を推定します。最初の Nu 個の変数が入力として使用され、次の Ny 個の変数が出力として使用されます。Nu と Ny は指定した多項式の次数の次元から決定されます。
sys は次の方程式で表されます。
ここで、y(t) は出力で、u(t) は入力で、e(t) は誤差です。
次数 [nb nf nk] により、推定された多項式の各成分内のパラメーターの数が決まります。
tt から特定の入力チャネルと出力チャネルを選択するには、名前と値の構文を使用して 'InputName' と 'OutputName' を対応する timetable 変数名に設定します。
sys = oe(u,y,[nb nf nk])u,y 内の時間領域入力信号と出力信号を使用します。データのサンプル時間は 1 秒と仮定されます。サンプル時間を変更するには、名前と値の構文を使用して Ts を設定します。
sys = oe(data,[nb nf nk])data 内の時間領域データまたは周波数領域データを使用します。
sys = oe(___,Name,Value)
初期パラメーターの構成
推定される初期条件を返す
[ は、推定される初期条件を sys,ic] = oe(___)initialCondition オブジェクトとして返します。この構文は、モデルの応答を同じ推定入力データを使用してシミュレートまたは予測し、その応答を同じ推定出力データと比較する場合に使用します。初期条件を組み込むことで、シミュレーションの最初の部分における一致が高まります。
例
入力遅延を指定する 2 つの手法を使用して、時間領域データから OE 多項式を推定します。
推定データを読み込みます。
load sdata1 tt1
B および F 多項式の次数 nb および nf を設定します。入力遅延 nk を 1 サンプルに設定します。モデル sys を計算します。
nb = 2; nf = 2; nk = 1; sys = oe(tt1,[nb nf nk]);
シミュレートしたモデルの応答を測定出力と比較します。
compare(tt1,sys)

プロットから、シミュレートしたモデルと推定データの間の適合率が 70% を超えていることがわかります。
nk を使用する代わりに、名前と値のペアの引数 'InputDelay' を使用して 1 サンプルの遅延を指定することもできます。
nk = 0;
sys1 = oe(tt1,[nb nf nk],'InputDelay',1);
figure
compare(tt1,sys1)
結果は同じです。
推定に関する詳しい情報は、idpoly の sys.Report プロパティを調べて確認できます。
sys.Report
ans =
Status: 'Estimated using OE'
Method: 'OE'
InitialCondition: 'zero'
Fit: [1×1 struct]
Parameters: [1×1 struct]
OptionsUsed: [1×1 idoptions.polyest]
RandState: [1×1 struct]
DataUsed: [1×1 struct]
Termination: [1×1 struct]
たとえば、終了条件に関する詳しい情報を調べます。
sys.Report.Termination
ans = struct with fields:
WhyStop: 'Near (local) minimum, (norm(g) < tol).'
Iterations: 3
FirstOrderOptimality: 0.0708
FcnCount: 7
UpdateNorm: 1.4809e-05
LastImprovement: 5.1744e-06
レポートには、反復回数および推定で反復が停止した理由に関する情報が含まれています。
推定データを読み込みます。
load oe_data1 data;
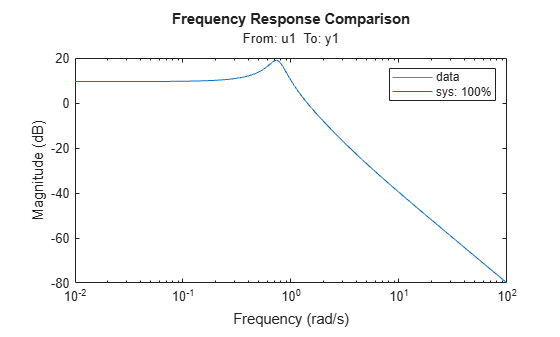
The idfrd オブジェクト data には、以下のモデルの連続時間周波数応答が含まれます。
モデルを推定します。
nb = 2; nf = 3; sys = oe(data,[nb nf]);
適合度を評価します。
compare(data,sys);
高次システムをシミュレートして収集したデータから高次 OE モデルを推定します。試行錯誤して正則化定数を決定し、モデル推定でその値を使用します。
データを読み込みます。
load regularizationExampleData.mat m0simdata
次数 30 の正則化されていない OE モデルを推定します。
m1 = oe(m0simdata,[30 30 1]);
試行錯誤により Lambda 値を決定して、正則化された OE モデルを取得します。
opt = oeOptions; opt.Regularization.Lambda = 1; m2 = oe(m0simdata,[30 30 1],opt);
モデルの出力を推定データと比較します。
opt = compareOptions('InitialCondition','z'); compare(m0simdata,m1,m2,opt);
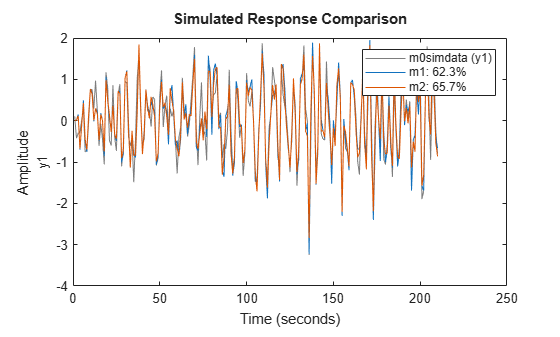
正則化されたモデル m2 では、正則化されていないモデル m1 より優れた適合が得られます。
モデル応答の分散を比較します。
bp = bodeplot(m1,m2);
bp.PhaseMatchingEnabled = "on";
bp.Characteristics.ConfidenceRegion.NumberOfStandardDeviations = 3;
showConfidence(bp);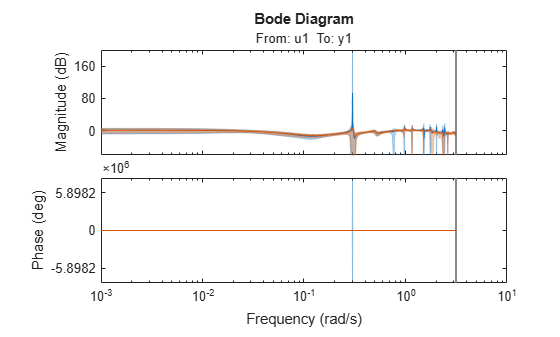
正則化されたモデル m2 では、正則化されていないモデル m1 と比較して分散が低減しています。
推定データ data およびサンプル時間 Ts を読み込みます。
load oe_data2.mat data Ts
iddata オブジェクト data には、以下のモデルの離散時間周波数応答が含まれます。
読み込んだ推定サンプル時間 Ts を表示します。
Ts
Ts = 1.0000e-03
この値はプロパティ data.Ts に一致しています。
data.Ts
ans = 1.0000e-03
入出力周波数帯域をナイキスト周波数に制限することで、data から連続モデルを推定できます。そうするには、推定プレフィルター オプション 'WeightingFilter' を指定して、0 から 0.5*pi/Ts rad/s の通過帯域を定義します。ソフトウェアではこの通過帯域外の周波数をもつ応答値がすべて無視されます。
opt = oeOptions('WeightingFilter',[0 0.5*pi/Ts]); Ts プロパティを 0 に設定して、data を連続時間データとして扱います。
data.Ts = 0;
連続モデルを推定します。
nb = 1; nf = 3; sys = oe(data,[nb nf],opt);
データを読み込みます。このデータは、行列形式の入出力データとサンプル時間で構成されます。
load sdata1i umat1i ymat1i Ts1i
OE 多項式モデル sys を推定し、ic で初期条件を返します。
nb = 2;
nf = 2;
nk = 1;
[sys,ic] = oe(umat1i,ymat1i,[nb,nf,nk],'Ts',Ts1i);
icic =
initialCondition with properties:
A: [2×2 double]
X0: [2×1 double]
C: [0.9428 0.4824]
Ts: 0.1000
ic は、sys の自由応答を状態空間形式で X0 の初期状態ベクトルにカプセル化する initialCondition オブジェクトです。ic は、sys を umat1i 入力信号でシミュレートし、その応答を ymat1i 出力信号と比較する場合に組み込むことができます。