n4sid
時間領域または周波数領域のデータを使用した部分空間法による状態空間モデルの推定
構文
説明
状態空間モデルの推定
sys = n4sid(tt,nx)tt のすべての入力信号と出力信号を使用して、次数 nx の離散時間状態空間モデル sys を推定します。
sys は次の形式のモデルです。
A、B、C、D、および K は状態空間行列です。u(t) は入力、y(t) は出力、e(t) は外乱、x(t) は nx 個の状態のベクトルです。
A、B、C、および K のエントリは、既定ではすべて推定可能な自由パラメーターです。動的システムの場合、D は既定ではゼロに固定されます。これは、システムに直達がないことを意味します。静的システム (nx = 0) の場合、D は既定では推定可能なパラメーターです。
この構文は SISO および MISO システムに使用できます。この関数では、timetable の最後の変数は単一の出力信号であると仮定します。この構文を使用して、tt に唯一の出力を表す単一の変数が含まれる場合に時系列モデルを推定することもできます。
MIMO システムの場合や、推定に使用する予定の変数よりも多くの変数が含まれる timetable の場合、名前と値の引数を使用して、必要な入力チャネルと出力チャネルの名前を指定する必要もあります。詳細については、tt を参照してください。
連続時間モデルを推定するには、名前と値の構文を使用して 'Ts' を 0 に設定します。
追加のオプションの指定
sys = n4sid(___,Name,Value)'Ts' を 0 と指定します。A、B、C、D、および K の各行列の既定の動作を変更するには、名前と値のペアの引数 'Form'、'Feedthrough'、'DisturbanceModel' を使用します。
この構文では、前述の任意の入力引数の組み合わせで使用できます。
例
状態空間モデルを推定し、その応答を測定出力と比較します。
timetable に格納されている入出力データ tt1 を読み込みます。
load sdata1.mat tt1
4 次状態空間モデルを推定します。
nx = 4; sys = n4sid(tt1,nx)
sys =
Discrete-time identified state-space model:
x(t+Ts) = A x(t) + B u(t) + K e(t)
y(t) = C x(t) + D u(t) + e(t)
A =
x1 x2 x3 x4
x1 0.8392 0.3129 -0.02105 0.03743
x2 -0.4768 0.6671 0.1428 -0.003757
x3 0.01951 0.08374 -0.09761 -1.046
x4 -0.003885 0.02914 0.8796 -0.03171
B =
u
x1 0.02635
x2 0.03301
x3 -7.256e-05
x4 0.0005861
C =
x1 x2 x3 x4
y 69.08 -26.64 2.237 -0.5601
D =
u
y 0
K =
y
x1 0.003282
x2 -0.009339
x3 0.003232
x4 0.003809
Sample time: 0.1 seconds
Parameterization:
FREE form (all coefficients in A, B, C free).
Feedthrough: none
Disturbance component: estimate
Number of free coefficients: 28
Use "idssdata", "getpvec", "getcov" for parameters and their uncertainties.
Status:
Estimated using N4SID on time domain data "tt1".
Fit to estimation data: 76.33% (prediction focus)
FPE: 1.21, MSE: 1.087
Model Properties
シミュレートしたモデルの応答を測定出力と比較します。
compare(tt1,sys)
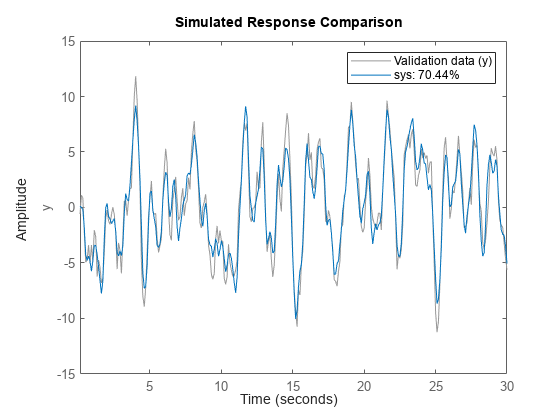
プロットから、シミュレートしたモデルと推定データの間の適合率が 70% を超えていることがわかります。
推定に関する詳しい情報は、idss の sys.Report プロパティを調べて確認できます。
sys.Report
ans =
Status: 'Estimated using N4SID with prediction focus'
Method: 'N4SID'
InitialState: 'estimate'
N4Weight: 'CVA'
N4Horizon: [6 10 10]
Fit: [1×1 struct]
Parameters: [1×1 struct]
OptionsUsed: [1×1 idoptions.n4sid]
RandState: [1×1 struct]
DataUsed: [1×1 struct]
たとえば、推定された初期状態に関する詳しい情報を調べます。
sys.Report.Parameters.X0
ans = 4×1
-0.0085
-0.0052
0.0193
0.0282
数値行列である入出力データ umat1 と ymat1、およびサンプル時間 Ts を読み込みます。
load sdata1 umat1 ymat1 Ts
引数 nx を 1 から 10 までの範囲に指定して、最適なモデル次数を調べます。
nx = 1:10;
sys = n4sid(umat1,ymat1,nx,'Ts',Ts);自動生成されるプロットに、nx で指定した次数のモデルに対するハンケル特異値が表示されます。
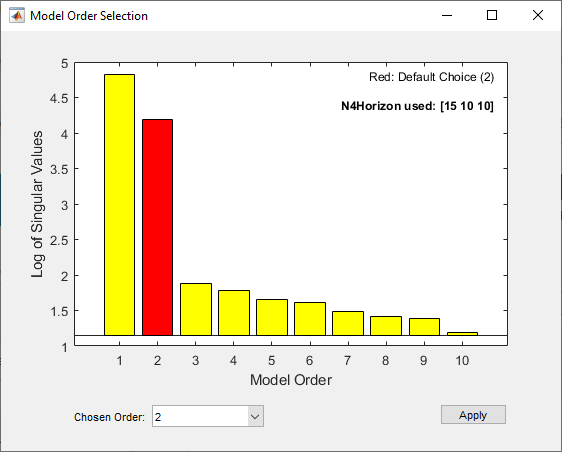
ハンケル特異値が比較的小さい状態については破棄してかまいません。提案される既定の次数の選択は 2 です。
[選択した次数] のリストでモデル次数を選択し、[適用] をクリックします。
推定データを読み込みます。
load iddata2 z2
推定オプションを指定します。重み付けスキーム 'N4Weight' を 'SSARX' に設定し、推定ステータス表示オプション 'Display' を 'on' に設定します。
opt = n4sidOptions('N4Weight','SSARX','Display','on')
Option set for the n4sid command:
InitialState: 'estimate'
N4Weight: 'SSARX'
N4Horizon: 'auto'
Display: 'on'
InputOffset: []
OutputOffset: []
EstimateCovariance: 1
OutputWeight: []
Focus: 'prediction'
WeightingFilter: []
EnforceStability: 0
Advanced: [1×1 struct]
Description of options
更新したオプション セットを使用して、3 次状態空間モデルを推定します。
nx = 3; sys = n4sid(z2,nx,opt);
A、B、および C の各行列の正準形を変更し、D 行列に直達項を含め、K 行列の外乱モデルの推定を排除します。
入出力データを読み込み、n4sid の既定のオプションを使用して 4 次システムを推定します。
load sdata1 tt1 sys1 = n4sid(tt1,4);
モード形式を指定し、A 行列を既定の A 行列と比較します。
sys2 = n4sid(tt1,4,'Form','modal'); A1 = sys1.A
A1 = 4×4
0.8392 0.3129 -0.0211 0.0374
-0.4768 0.6671 0.1428 -0.0038
0.0195 0.0837 -0.0976 -1.0462
-0.0039 0.0291 0.8796 -0.0317
A2 = sys2.A
A2 = 4×4
0.7554 0.3779 0 0
-0.3779 0.7554 0 0
0 0 -0.0669 0.9542
0 0 -0.9542 -0.0669
直達項を含め、D 行列を比較します。
sys3 = n4sid(tt1,4,'Feedthrough',1);
D1 = sys1.DD1 = 0
D3 = sys3.D
D3 = 0.0487
外乱のモデル化を排除し、K 行列を比較します。
sys4 = n4sid(tt1,4,'DisturbanceModel','none'); K1 = sys1.K
K1 = 4×1
0.0033
-0.0093
0.0032
0.0038
K4 = sys4.K
K4 = 4×1
0
0
0
0
連続時間正準形モデルを推定します。
推定データを読み込みます。
load iddata1 z1
モデルを推定します。Ts を 0 に設定して連続モデルを指定します。
nx = 2; sys = n4sid(z1,nx,'Ts',0,'Form','canonical');
sys は、正準形の 2 次連続時間状態空間モデルです。
部分空間アルゴリズム SSARX を使用して閉ループ データから状態空間モデルを推定します。このアルゴリズムは、フィードバックの影響を取得するのに他の重み付けアルゴリズムよりも優れています。
ホワイト ノイズで破損した 2 次システムの閉ループ推定データを生成します。
N = 1000; K = 0.5; rng('default'); w = randn(N,1); z = zeros(N,1); u = zeros(N,1); y = zeros(N,1); e = randn(N,1); v = filter([1 0.5],[1 1.5 0.7],e); for k = 3:N u(k-2) = -K*y(k-2) + w(k-2); u(k-1) = -K*y(k-1) + w(k-1); z(k) = 1.5*z(k-1) - 0.7*z(k-2) + u(k-1) + 0.5*u(k-2); y(k) = z(k) + 0.8*v(k); end dat = iddata(y, u, 1);
N4SID アルゴリズムで使用される重み付けスキーム 'N4weight' を指定します。2 つのオプション セットを作成します。一方のオプション セットで、'N4weight' を 'CVA' に設定します。もう一方のオプション セットで、'N4weight' を 'SSARX' に設定します。
optCVA = n4sidOptions('N4weight','CVA'); optSSARX = n4sidOptions('N4weight','SSARX');
オプション セットを使用して状態空間モデルを推定します。
sysCVA = n4sid(dat,2,optCVA); sysSSARX = n4sid(dat,2,optSSARX);
2 つのモデルの推定データとの適合を比較します。
compare(dat,sysCVA,sysSSARX);
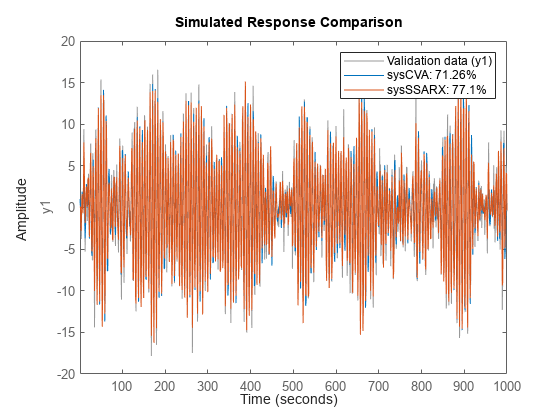
プロットからわかるように、SSARX アルゴリズムを使用して推定したモデルの方が CVA アルゴリズムを使用して推定したモデルよりも適合しています。
入力引数
名前と値の引数
出力引数
参照
[1] Ljung, L. System Identification: Theory for the User, Appendix 4A, Second Edition, pp. 132–134. Upper Saddle River, NJ: Prentice Hall PTR, 1999.
[2] van Overschee, P., and B. De Moor. Subspace Identification of Linear Systems: Theory, Implementation, Applications. Springer Publishing: 1996.
[3] Verhaegen, M. "Identification of the deterministic part of MIMO state space models." Automatica, 1994, Vol. 30, pp. 61–74.
[4] Larimore, W.E. "Canonical variate analysis in identification, filtering and adaptive control." Proceedings of the 29th IEEE Conference on Decision and Control, 1990, pp. 596–604.
[5] McKelvey, T., H. Akcay, and L. Ljung. "Subspace-based multivariable system identification from frequency response data." IEEE Transactions on Automatic Control, 1996, Vol. 41, pp. 960–979.