tfest
伝達関数モデルの推定
構文
説明
伝達関数モデルの推定
sys = tfest(u,y,np)u,y 内の時間領域入力信号と出力信号を使用して連続時間の伝達関数を推定します。データのサンプル時間は 1 秒と仮定されます。この仮定されたサンプル時間は変更できません。サンプル時間が 1 秒以外のデータからモデルを推定する場合は、次の 2 つの代替方法があります。
代わりに、
'Ts'の名前と値の引数を使用してサンプル時間を設定することで、離散時間システムを推定します。たとえば、sys = tfest(u,y,np,'Ts',0.1)ではサンプル時間が0.1に設定されます。この構文は、SISO、MISO、および MIMO システムで使用できます。連続時間システムを推定する前に、行列データを
timetableオブジェクトまたはiddataオブジェクトに変換します。これらの形式では、サンプル時間の知識をデータに組み込むことができます。詳細については、u,yを参照してください。
行列ベースのデータから連続時間モデルを推定することは推奨されません。
sys = tfest(___,Name,Value)sys = tfest(um,ym,np,'Ts',0.1) を使用して、0.1 のサンプル時間をもつ行列データから離散時間システムを指定します。sys = tfest(data,np,nz,'InputNames',["u1","u2"],'OutputNames',["y1","y3"]) を使用して、MIMO timetable データに使用する変数と一致する入力および出力信号変数名を指定します。
初期パラメーターの構成
追加の推定オプションの指定
推定される初期条件を返す
[ は、推定される初期条件を sys,ic] = tfest(___)initialCondition オブジェクトとして返します。この構文は、モデルの応答を同じ推定入力データを使用してシミュレートまたは予測し、その応答を同じ推定出力データと比較する場合に使用します。初期条件を組み込むことで、シミュレーションの初期段階において、測定データと、シミュレーション データまたは予測データとの一致率が高まります。
例
timetable tt1 内の時間領域システム応答データを読み込みます。
load sdata1.mat tt1;
極の数 np を 2 に設定して、伝達関数を推定します。
np = 2; sys = tfest(tt1,np);
sys は、推定された 2 極の伝達関数を含む idtf モデルです。
結果の推定モデル sys の分子係数と分母係数を確認します。
sys.Numerator
ans = 1×2
2.4554 176.9856
sys.Denominator
ans = 1×3
1.0000 3.1625 23.1631
分子と分母の推定における不確かさおよびその他の情報を表示するには、tfdataを使用します。
時間領域システムの応答データ z2 を読み込み、そのデータを使用して 2 つの極と 1 つの零点を含む伝達関数を推定します。
load iddata2 z2; np = 2; nz = 1; sys = tfest(z2,np,nz);
sys は、推定された伝達関数を含む idtf モデルです。
データ z2 を読み込みます。これは時間領域システム応答データを含む iddata オブジェクトです。
load iddata2 z2;
2 つの極と 1 つの零点を含み、既知の伝達遅延 iodelay を含む伝達関数モデル sys を推定します。
np = 2; nz = 1; iodelay = 0.2; sys = tfest(z2,np,nz,iodelay);
sys は、推定された伝達関数を含み、IODelay プロパティが 0.2 秒に設定された idtf モデルです。
時間領域システムの応答データ z2 を読み込み、そのデータを使用してシステムの 2 極 1 零点の伝達関数を推定します。iodelay の値を NaN に設定して、伝達関数の未知の伝達遅延を指定します。
load iddata2 z2; np = 2; nz = 1; iodelay = NaN; sys = tfest(z2,np,nz,iodelay);
sys は、推定された伝達関数を含む idtf モデルで、その IODelay プロパティはそのデータを使用して推定されます。
時間領域システム応答データを読み込みます。このデータは、入力行列および出力行列である umat2 と ymat2 に含まれます。
load sdata2.mat umat2 ymat2
2 つの極と 1 つの零点をもつ離散時間の伝達関数を推定します。サンプル時間 Ts を 0.1 秒に指定し、伝達遅延 iodelay を 2 秒に指定します。
np = 2;
nz = 1;
iodelay = 2;
Ts = 0.1;
sysd = tfest(umat2,ymat2,np,nz,iodelay,'Ts',Ts)sysd =
From input "u1" to output "y1":
1.8 z^-1
z^(-2) * ----------------------------
1 - 1.418 z^-1 + 0.6613 z^-2
Sample time: 0.1 seconds
Discrete-time identified transfer function.
Parameterization:
Number of poles: 2 Number of zeros: 1
Number of free coefficients: 3
Use "tfdata", "getpvec", "getcov" for parameters and their uncertainties.
Status:
Estimated using TFEST on time domain data "umat2,ymat2".
Fit to estimation data: 80.26%
FPE: 2.095, MSE: 2.063
Model Properties
既定では、モデルに直達はなく、推定された伝達関数の分子多項式は最初の係数 b0 が 0 になります。b0 を推定するには、推定中に Feedthrough プロパティを指定します。
推定データ z5 を読み込みます。
load iddata5 z5
最初に、2 つの極と 1 つの零点を含み、直達がない離散時間の伝達関数モデルを推定します。サンプル時間は z5 の Ts プロパティから取得します。
np = 2;
nz = 1;
sys = tfest(z5,np,nz,'Ts',z5.Ts);推定された伝達関数は次の形式になります。
既定では、モデルに直達はなく、推定された伝達関数の分子多項式は最初の係数 b0 が 0 になります。b0 を推定するには、推定中に Feedthrough プロパティを指定します。
sys = tfest(z5,np,nz,'Ts',z5.Ts,'Feedthrough',true);
推定された伝達関数の分子多項式は、次のように最初の係数が非ゼロになります。
直達および伝達遅延があるモデルとないモデルの 2 つの離散時間モデルを比較します。
測定された入力から出力への遅延がある場合は、直達がないこと、または実際の伝送遅延が原因である可能性があります。離散時間モデルの場合、直達がないことは、入力と出力の間の 1 サンプルのラグに相当します。Feedthrough = false と iodelay = 0 を使用してモデルを推定すると、Feedthrough = true と iodelay = 1 を使用して推定されたシステムと等価の離散時間システムが作成されます。どちらのシステムでも、同じ時間領域応答と周波数領域応答がステップ プロットやボード線図などに示されます。ただし、balred を使用してこれらのモデルを低次元化するか、連続時間表現に変換すると、異なる結果になります。したがって、ベスト プラクティスは、観測された遅延の原因が伝達遅延か、または直達がないことかを確認することです。
直達のない離散時間モデルを推定します。
load iddata1 z1 np = 2; nz = 2; sys1 = tfest(z1,np,nz,'Ts',z1.Ts);
sys1 には直達がなく、したがって で始まる分子多項式があるため、sys1 には 1 サンプルのラグがあります。IODelay プロパティは 0 です。
直達をもち、零点を 2 個から 1 個に減らした、1 サンプルの入出力遅延を発生させる別の離散時間を推定します。
sys2 = tfest(z1,np,nz-1,1,'Ts',z1.Ts,'Feedthrough',true);
モデルのボード応答を比較します。
bode(sys1,sys2);
sys1 と sys2 で使用される離散方程式は等価であるため、ボード応答も等価です。
モデルを連続時間に変換し、これらのモデルのボード応答を比較します。
sys1c = d2c(sys1); sys2c = d2c(sys2); bode(sys1c,sys2c); legend
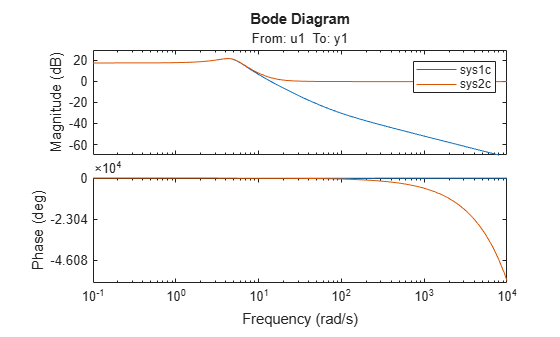
プロットに示されているように、モデルを連続時間に変換すると 2 つのモデルのボード応答は一致しません。sys1c のように直達がない場合は、必ずラグがあります。sys2c のように直達がある場合は、ラグはあり得ません。連続時間の直達は離散時間の直達にマッピングされます。連続時間のラグは離散時間の遅延にマッピングされます。
最初の入力に 2 サンプル、2 番目の入力に 0 サンプルの遅延をもつ、2 入力 1 出力の離散時間の伝達関数を推定します。どちらの入力にも直達はありません。
データを読み込み、データを推定データセットと検証データセットに分けます。
load iddata7 z7 ze = z7(1:300); zv = z7(200:400);
入力から出力への各伝達関数に対して 2 つの極と 1 つの零点をもつ、2 入力 1 出力の伝達関数を推定します。
Lag = [2;0]; Ft = [false,false]; model = tfest(ze,2,1,'Ts',z7.Ts,'Feedthrough',Ft,'InputDelay',Lag);
選択した Feedthrough 値によって、最初の分子係数が 0 (直達なし) かそれ以外か (非ゼロの直達) かが決まります。遅延は一般的に、InputDelay プロパティまたは IODelay プロパティを使用して個別に表されます。この例では InputDelay のみを使用して遅延を表しています。
推定されたモデルを検証します。データ外れ値を検証対象から除外します。
I = 1:201;
I(114:118) = [];
opt = compareOptions('Samples',I);
compare(zv,model,opt)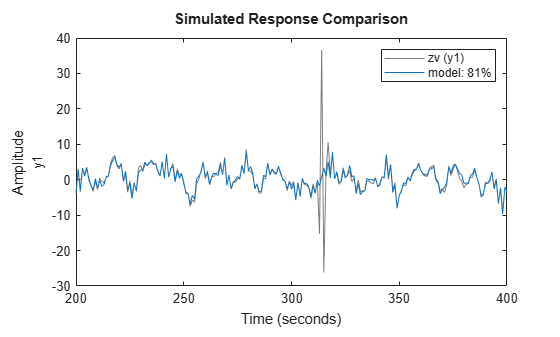
正則化されたインパルス応答の推定を使用して、15 次伝達関数モデルを同定します。
データを読み込みます。
load regularizationExampleData m0simdata;
正則化されたインパルス応答 (FIR) モデルを取得します。
opt = impulseestOptions('RegularizationKernel','DC'); m0 = impulseest(m0simdata,70,opt);
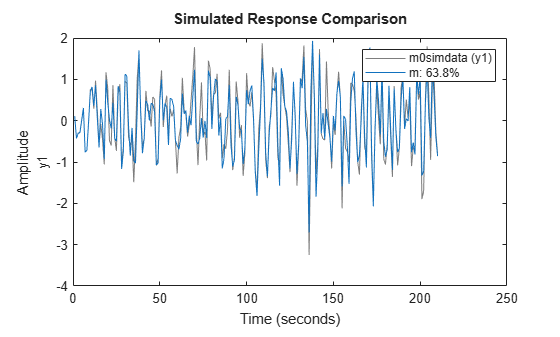
次数を 15 に減らした後に、モデルを伝達関数モデルに変換します。
m = idtf(balred(idss(m0),15));
モデルの出力をデータと比較します。
compare(m0simdata,m);
初期化と探索法を指定する tfest のオプション セットを作成します。また、各反復の損失関数値が表示されることを指定する表示オプションも設定します。
opt = tfestOptions('InitializeMethod','n4sid','Display','on','SearchMethod','lsqnonlin');
時間領域システム応答データ z2 を読み込み、そのデータを使用して、2 つの極と 1 つの零点をもつ伝達関数を推定します。推定オプションに opt を指定します。
load iddata2 z2; np = 2; nz = 1; iodelay = 0.2; sys = tfest(z2,np,nz,iodelay,opt);
sys は、推定された伝達関数を含む idtf モデルです。
時間領域システム応答データ z2 を読み込み、そのデータを使用して 2 極 1 零点の伝達関数を推定します。入力遅延を指定します。
load iddata2 z2; np = 2; nz = 1; input_delay = 0.2; sys = tfest(z2,np,nz,'InputDelay',input_delay);
sys は、入力遅延が 0.2 秒の推定された伝達関数を含む idtf モデルです。
bode を使用して以下のシステムの振幅と位相応答を取得します。
0.1 ~ 10 rad/s の範囲の 100 個の周波数点を使用して、周波数応答データを取得します。frd を使用して周波数応答データ オブジェクトを作成します。
freq = logspace(-1,1,100); [mag,phase] = bode(tf([1 0.2],[1 2 1 1]),freq); data = frd(mag.*exp(1j*phase*pi/180),freq);
data を使用して 3 極 1 零点の伝達関数を推定します。
np = 3; nz = 1; sys = tfest(data,np,nz);
sys は、推定された伝達関数を含む idtf モデルです。
時間領域システム応答データ co2data を読み込みます。これには、それぞれ 2 つの入力と 1 つ出力をもつ 2 つの実験からのデータが含まれます。1 番目の実験のデータを、サンプル時間 0.5 秒の iddata オブジェクト data に変換します。
load co2data;
Ts = 0.5;
data = iddata(Output_exp1,Input_exp1,Ts);探索法、および入力オフセットと出力オフセットについて、推定オプションを指定します。探索の反復最大回数も指定します。
opt = tfestOptions('SearchMethod','gna'); opt.InputOffset = [170;50]; opt.OutputOffset = mean(data.y(1:75)); opt.SearchOptions.MaxIterations = 50;
測定データと推定オプション セット opt を使用して伝達関数を推定します。入力から出力への伝達関数を指定します。
np = 3; nz = 1; iodelay = [2 5]; sys = tfest(data,np,nz,iodelay,opt);
iodelay は、1 番目と 2 番目の入力から出力からの、入力から出力への遅延をそれぞれ 2 秒および 5 秒として指定します。
sys は、推定された伝達関数を含む idtf モデルです。
時間領域システムの応答データを読み込み、そのデータを使用してシステムの伝達関数を推定します。既知および未知の伝達遅延を指定します。
load co2data;
Ts = 0.5;
data = iddata(Output_exp1,Input_exp1,Ts);data は、2 つの入力チャネルと 1 つの出力チャネルをもち、サンプル レートが 0.5 秒の iddata オブジェクトです。
オプション セット opt を作成します。探索法、および入力オフセットと出力オフセットについて、推定オプションを指定します。探索の反復最大回数も指定します。
opt = tfestOptions('Display','on','SearchMethod','gna'); opt.InputOffset = [170; 50]; opt.OutputOffset = mean(data.y(1:75)); opt.SearchOptions.MaxIterations = 50;
2 秒の既知の遅延を表す 2 と未知の遅延を表す nan を使用して、iodelay の未知および既知の伝達遅延を指定します。iodelay および opt を使用して伝達関数を推定します。
np = 3; nz = 1; iodelay = [2 nan]; sys = tfest(data,np,nz,iodelay,opt);
sys は、推定された伝達関数を含む idtf モデルです。
予想される分子および分母構造と遅延制約をもつ伝達関数モデルを作成します。
この例では、実験データは 2 つの入力と 1 つの出力で構成されます。どちらの伝達遅延も未知で、同一の上限をもちます。さらに、どちらの入力から出力への伝達関数も構造は同一です。
init_sys = idtf(NaN(1,2),[1,NaN(1,3)],'IODelay',NaN);
init_sys.Structure(1).IODelay.Free = true;
init_sys.Structure(1).IODelay.Maximum = 7;init_sys は、1 つの入力から出力への伝達関数の構造を記述する idtf モデルです。伝達関数は 1 つの零点、3 つの極、および伝達遅延で構成されます。NaN の使用は、未知の係数を示します。
init_sys.Structure(1).IODelay.Free = true は、伝達遅延が固定ではないことを示します。
init_sys.Structure(1).IODelay.Maximum = 7 は、伝達遅延の上限を 7 秒に設定します。
両方の入力から出力への伝達関数を指定します。
init_sys = [init_sys,init_sys];
時間領域システム応答データを読み込み、そのデータを使用して伝達関数を推定します。tfestOptions オプション セット opt でオプションを指定します。
load co2data; Ts = 0.5; data = iddata(Output_exp1,Input_exp1,Ts); opt = tfestOptions('Display','on','SearchMethod','gna'); opt.InputOffset = [170;50]; opt.OutputOffset = mean(data.y(1:75)); opt.SearchOptions.MaxIterations = 50; sys = tfest(data,init_sys,opt);
sys は、推定された伝達関数を含む idtf モデルです。
比較により推定結果を解析します。compareOptions オプション セット opt2 を作成し、入力オフセットと出力オフセットを指定してから、compare を使用します。
opt2 = compareOptions; opt2.InputOffset = opt.InputOffset; opt2.OutputOffset = opt.OutputOffset; compare(data,sys,opt2)
![]()
与えられたデータの入出力のペアに対して異なる数の極を含む、複数入力、単出力の伝達関数を推定します。
周波数応答データを取得します。
たとえば、frd を使用して、以下のシステムの周波数応答データ モデルを作成します。
0.01 rad/s ~ 100 rad/s の範囲の 100 個の周波数点を使用して、周波数応答データを取得します。
G = tf({[1 2],[5]},{[1 2 4 5],[1 2 1 1 0]},0,'IODelay',[4 0.6]);
data = frd(G,logspace(-2,2,100));data は、G の連続時間周波数応答を含む frd オブジェクトです。
data の伝達関数を推定します。
np = [3 4]; nz = [1 0]; iodelay = [4 0.6]; sys = tfest(data,np,nz,iodelay);
np は、推定された伝達関数の極の数を指定します。np の 1 番目の要素は、1 番目の入力から出力への伝達関数に 3 つの極が含まれることを示します。同様に、np の 2 番目の要素は、2 番目の入力から出力への伝達関数に 4 つの極が含まれていることを示します。
nz は、推定された伝達関数の零点の数を指定します。nz の 1 番目の要素は、1 番目の入力から出力への伝達関数に 1 つの零点が含まれることを示します。同様に、np の 2 番目の要素は、2 番目の入力から出力への伝達関数に零点が含まれていないことを示します。
iodelay は、1 番目の入力から出力への伝達遅延を 4 秒として指定します。2 番目の入力から出力への伝達遅延は 0.6 秒として指定されます。
sys は、推定された伝達関数を含む idtf モデルです。
周波数応答データを使用して、不安定システムを記述する伝達関数を推定します。
idtf を使用して、以下のシステムの伝達関数モデル G を作成します。
G = idtf({[1 2], 5},{[1 2 4 5],[1 2 1 1 1]});idfrd を使用して、G の周波数応答データ モデル data を作成します。0.01 rad/s ~ 100 rad/s の範囲の 100 個の周波数点を指定します。
data = idfrd(G,logspace(-2,2,100));
data は idfrd オブジェクトです。
data の伝達関数を推定します。
np = [3 4]; nz = [1 0]; sys = tfest(data,np,nz);
np は、推定された伝達関数の極の数を指定します。np の 1 番目の要素は、1 番目の入力から出力への伝達関数に 3 つの極が含まれることを示します。同様に、np の 2 番目の要素は、2 番目の入力から出力への伝達関数に 4 つの極が含まれていることを示します。
nz は、推定された伝達関数の零点の数を指定します。nz の 1 番目の要素は、1 番目の入力から出力への伝達関数に 1 つの零点が含まれることを示します。同様に、nz の 2 番目の要素は、2 番目の入力から出力への伝達関数に零点が含まれていないことを示します。
sys は、推定された伝達関数を含む idtf モデルです。
pole(sys)
ans = 7×1 complex
-1.5260 + 0.0000i
-0.2370 + 1.7946i
-0.2370 - 1.7946i
-1.4656 + 0.0000i
-1.0000 + 0.0000i
0.2328 + 0.7926i
0.2328 - 0.7926i
sys は、極の表示に示されているように、不安定システムです。
高密度の周波数応答測定データを読み込みます。このデータは、フィードバック制御を使用して平衡に維持される不安定処理に対応します。
load HighModalDensityData FRF f
同定のためにデータを idfrd オブジェクトとしてパッケージ化し、ボード振幅応答を求めます。
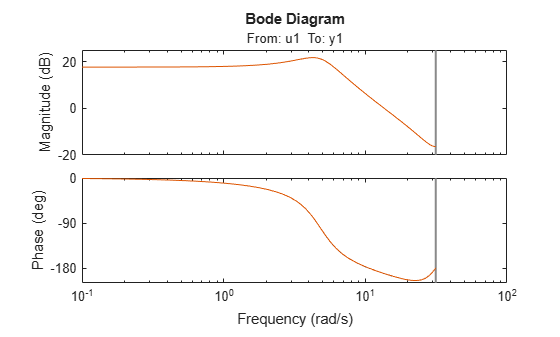
G = idfrd(permute(FRF,[2 3 1]),f,0,'FrequencyUnit','Hz'); bodemag(G)
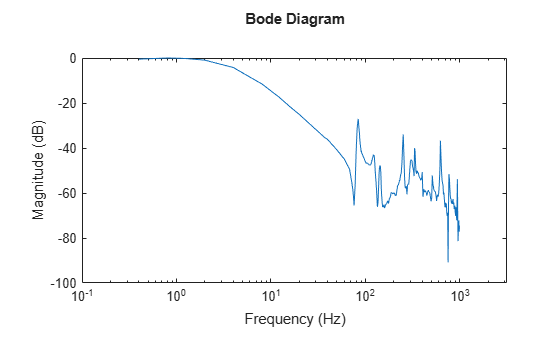
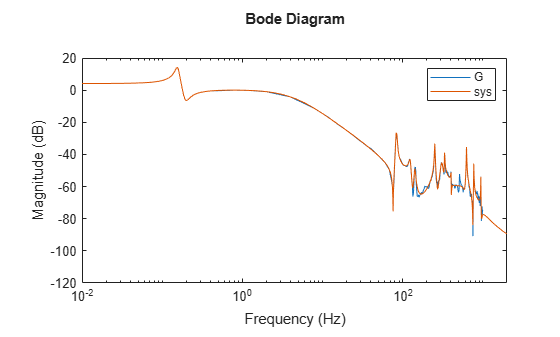
32 個の極と 32 個の零点をもつ伝達関数を推定し、ボード振幅応答を比較します。
sys = tfest(G,32,32); bodemag(G, sys) xlim([0.01,2e3]) legend
データを読み込んでプロットします。
load iddata1ic z1i plot(z1i)
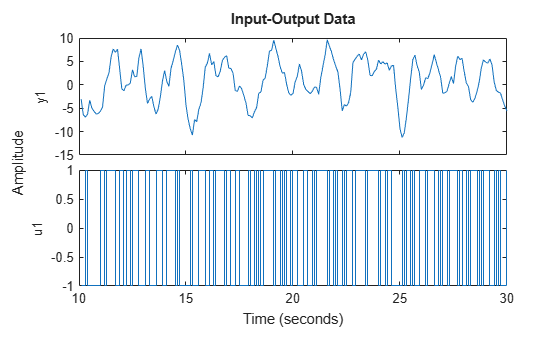
出力データ y(1) の初期値を確認します。
ystart = z1i.y(1)
ystart = -3.0491
測定された出力は 0 から始まりません。
2 次伝達関数 sys を推定し、推定された初期条件 ic を返します。
[sys,ic] = tfest(z1i,2,1); ic
ic =
initialCondition with properties:
A: [2×2 double]
X0: [2×1 double]
C: [0.2957 5.2441]
Ts: 0
ic は、sys の自由応答を状態空間形式で X0 の初期状態ベクトルにカプセル化する initialCondition オブジェクトです。
初期条件を組み込まずに、推定データを使用して sys をシミュレートします。シミュレートした出力を測定出力とともにプロットします。
y_no_ic = sim(sys,z1i);
figure
plot(y_no_ic,z1i)
legend show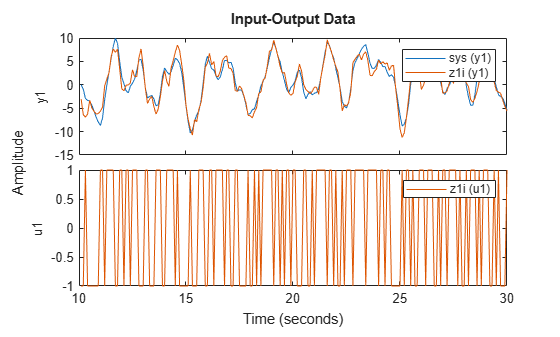
測定出力とシミュレートした出力は、シミュレーションの開始時には一致していません。
初期条件を simOptions オプション セットに組み込みます。
opt = simOptions('InitialCondition',ic); y_ic = sim(sys,z1i,opt); figure plot(y_ic,z1i) legend show

シミュレーションでは、入力信号に対するモデル応答が、初期条件に対する自由応答と結合されます。測定出力とシミュレートした出力は、シミュレーションの開始時に以前より一致するようになります。この初期条件は、推定データ z1i に対してのみ有効です。
入力引数
名前と値の引数
出力引数
アルゴリズム
参照
[1] Garnier, H., M. Mensler, and A. Richard. “Continuous-Time Model Identification from Sampled Data: Implementation Issues and Performance Evaluation.” International Journal of Control 76, no. 13 (January 2003): 1337–57. https://doi.org/10.1080/0020717031000149636.
[2] Ljung, Lennart. “Experiments with Identification of Continuous Time Models.” IFAC Proceedings Volumes 42, no. 10 (2009): 1175–80. https://doi.org/10.3182/20090706-3-FR-2004.00195.
[3] Young, Peter, and Anthony Jakeman. “Refined Instrumental Variable Methods of Recursive Time-Series Analysis Part III. Extensions.” International Journal of Control 31, no. 4 (April 1980): 741–64. https://doi.org/10.1080/00207178008961080.
[4] Drmač, Z., S. Gugercin, and C. Beattie. “Quadrature-Based Vector Fitting for Discretized H2 Approximation.” SIAM Journal on Scientific Computing 37, no. 2 (January 2015): A625–52. https://doi.org/10.1137/140961511.
[5] Ozdemir, Ahmet Arda, and Suat Gumussoy. “Transfer Function Estimation in System Identification Toolbox via Vector Fitting.” IFAC-PapersOnLine 50, no. 1 (July 2017): 6232–37. https://doi.org/10.1016/j.ifacol.2017.08.1026.
バージョン履歴
R2012a で導入参考
tfestOptions | idtf | timetable | ssest | procest | ar | arx | oe | bj | polyest | greyest
トピック
- コマンド ラインでの伝達関数モデルの推定
- Estimate Transfer Function Models with Transport Delay to Fit Given Frequency-Response Data
- Estimate Transfer Function Models with Prior Knowledge of Model Structure and Constraints
- Apply Initial Conditions When Simulating Identified Linear Models
- Troubleshoot Frequency-Domain Identification of Transfer Function Models
- 伝達関数モデルとは
- Regularized Estimates of Model Parameters
- Estimating Models Using Frequency-Domain Data