greyest
線形グレーボックス モデルの ODE パラメーターの推定
説明
例
線形グレーボックス フレームワークを使用して DC モーターのパラメーターを推定します。
測定データを読み込みます。
load('dcmotordata'); data = iddata(y, u, 0.1, 'Name', 'DC-motor'); data.InputName = 'Voltage'; data.InputUnit = 'V'; data.OutputName = {'Angular position', 'Angular velocity'}; data.OutputUnit = {'rad', 'rad/s'}; data.Tstart = 0; data.TimeUnit = 's';
data は、出力である角度位置と角速度の測定データを含む iddata オブジェクトです。また、入力である駆動電圧も含まれています。
システム ダイナミクスを表すグレーボックス モデルを作成します。
DC モーターについて、角度位置 (rad) と角速度 (rad/s) を出力として選択し、駆動電圧 (V) を入力として選択します。次の形式の線形状態空間構造を設定します。
はモーターの時定数 (秒)、 は入力から角速度への静的ゲイン (rad/(V*s)) です。
G = 0.25; tau = 1; init_sys = idgrey('motorDynamics',tau,'cd',G,0);
状態空間形式の支配方程式は MATLAB® ファイル motorDynamics.m で表されています。このファイルの内容を確認するには、MATLAB コマンド プロンプトで「edit motorDynamics.m」と入力します。
は motorDynamics.m にオプションの引数として提供されている既知の量です。
は自由推定パラメーターです。
init_sys は motor.m に関連付けられている idgrey モデルです。
を推定します。
sys = greyest(data,init_sys);
sys は、 の推定値を含む idgrey モデルです。
sys に関連付けられている推定パラメーター値を取得するには、getpvec(sys) を使用します。
結果を解析します。
opt = compareOptions('InitialCondition','zero'); compare(data,sys,Inf,opt)
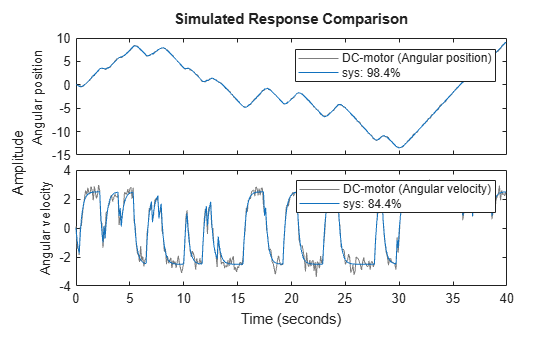
sys は、角度位置は 98.35% 適合し、角速度は 84.42% 適合します。
正則化定数を使用するときのパラメーターに関する事前情報を組み込んで DC モーターのパラメーターを推定します。
モデルは静的ゲイン G と時定数 でパラメーター化されています。事前情報から、G は約 4、 は約 1 であることがわかっています。また、G よりも の値の方が信頼でき、その推定が初期推定から離れないようにします。
推定データを読み込みます。
load regularizationExampleData.mat motorData
データには、与えられた入力電圧におけるモーターの角度位置と角速度の測定値が含まれています。
DC モーターのダイナミクスの idgrey モデルを作成します。グレーボックス モデルの構造を表す関数 DCMotorODE を使用します。
mi = idgrey(@DCMotorODE,{'G', 4; 'Tau', 1},'cd',{}, 0);
mi = setpar(mi, 'label', 'default');DCMotorODE 関数を確認する場合は、次のように入力します。
type DCMotorODE.mfunction [A,B,C,D] = DCMotorODE(G,Tau,Ts) %DCMOTORODE ODE file representing the dynamics of a DC motor parameterized %by gain G and time constant Tau. % % [A,B,C,D,K,X0] = DCMOTORODE(G,Tau,Ts) returns the state space matrices % of the DC-motor with time-constant Tau and static gain G. The sample % time is Ts. % % This file returns continuous-time representation if input argument Ts % is zero. If Ts>0, a discrete-time representation is returned. % % See also IDGREY, GREYEST. % Copyright 2013 The MathWorks, Inc. A = [0 1;0 -1/Tau]; B = [0; G/Tau]; C = eye(2); D = [0;0]; if Ts>0 % Sample the model with sample time Ts s = expm([[A B]*Ts; zeros(1,3)]); A = s(1:2,1:2); B = s(1:2,3); end
正則化オプション Lambda を指定します。
opt = greyestOptions; opt.Regularization.Lambda = 100;
正則化オプション R を指定します。
opt.Regularization.R = [1, 1000];
G よりも の値の方が信頼できるため、2 番目のパラメーターの方が重みが大きくなるように指定します。
パラメーターの初期値を正則化オプション * として指定します。
opt.Regularization.Nominal = 'model';正則化されたグレーボックス モデルを推定します。
sys = greyest(motorData, mi, opt);