pem
線形および非線形のモデルを改良するための予測誤差の最小化
説明
例
部分空間法を適用する n4sid を使用して、離散時間状態空間モデルを推定します。
データを読み込み、推定データの最初の 300 データ点を抽出します。
load sdata7 tt7; tt7e = tt7(1:300,:);
'Focus' オプションを 'simulation' に設定してモデル init_sys を推定します。
opt = n4sidOptions('Focus','simulation'); init_sys = n4sid(tt7e,4,opt);
推定の適合度を表示します。
init_sys.Report.Fit.FitPercent
ans = 73.8490
pem を使用して適合度を高めます。
sys = pem(tt7e,init_sys);
結果を解析します。
compare(tt7e,sys,init_sys);
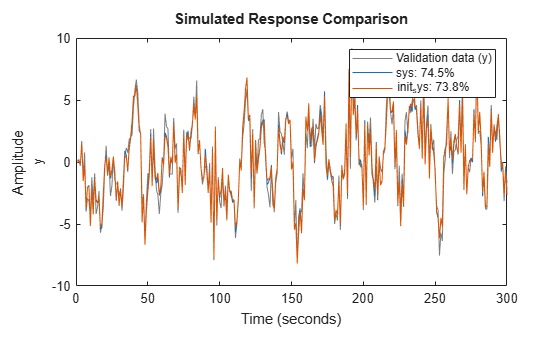
pem を使用すると、推定データへの適合が改善されます。
DC モーター データに適合する非線形グレーボックス モデルのパラメーターを推定します。
実験データを読み込み、開始時間や単位などの信号の属性を指定します。
load('dcmotordata'); data = iddata(y, u, 0.1); data.Tstart = 0; data.TimeUnit = 's';
非線形グレーボックス モデル (idnlgrey) のモデルを構成します。
この例では、dcmotor_m.m ファイルを使用します。このファイルを表示するには、MATLAB® コマンド プロンプトで「edit dcmotor_m.m」と入力します。
file_name = 'dcmotor_m'; order = [2 1 2]; parameters = [1;0.28]; initial_states = [0;0]; Ts = 0; init_sys = idnlgrey(file_name,order,parameters,initial_states,Ts); init_sys.TimeUnit = 's'; setinit(init_sys,'Fixed',{false false});
init_sys は、dcmotor_m.m で構造が記述された非線形グレーボックス モデルです。モデルには、order の指定に従って、1 つの入力、2 つの出力、2 つの状態が含まれています。
setinit(init_sys,'Fixed',{false false}) で、init_sys の初期状態を自由推定パラメーターにするように指定しています。
モデルのパラメーターと初期状態を推定します。
sys = pem(data,init_sys);
sys は、推定されたパラメーターとその共分散がカプセル化された idnlgrey モデルです。
推定結果を解析します。
compare(data,sys,init_sys);
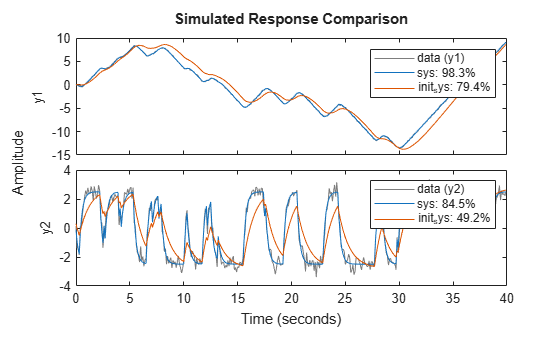
sys は推定データに 98.34% 適合します。
プロセス モデル構造を作成し、そのパラメーター値を更新して予測誤差を最小化します。
プロセス モデルの係数を初期化します。
init_sys = idproc('P2UDZ');
init_sys.Kp = 10;
init_sys.Tw = 0.4;
init_sys.Zeta = 0.5;
init_sys.Td = 0.25;
init_sys.Tz = 0.01;init_sys の係数 Kp、Tw、Zeta、Td、および Tz が初期推定で構成されます。
init_sys を使用して、測定データを使用して予測誤差を最小化するモデルの推定を構成します。init_sys は idproc モデルであるため、procestOptions を使用してオプション セットを作成します。
load iddata1 z1; opt = procestOptions('Display','on','SearchMethod','lm'); sys = pem(z1,init_sys,opt);
Process Model Identification
Estimation data: Time domain data z1
Data has 1 outputs, 1 inputs and 300 samples.
Model Type:
{'P2DUZ'}
Algorithm: Levenberg-Marquardt search
<br>
------------------------------------------------------------------------------------------
<br>
Norm of First-order Improvement (%) <br> Iteration Cost step optimality Expected Achieved Bisections <br>------------------------------------------------------------------------------------------
0 29.7194 - 260 2.57 - -
1 28.6801 6 98.9 2.57 3.5 0
2 8.38196 4.91 42.2 2.72 70.8 0
3 8.2138 0.704 41.3 1.37 2.01 12
4 8.00237 0.528 48.3 2.89 2.57 9
5 7.65577 0.588 73.1 2.02 4.33 9
6 6.851 0.809 196 4.51 10.5 9
7 5.72335 1.08 459 4.59 16.5 8
8 3.3434 2.11 1.63e+03 11.4 41.6 7
9 1.80724 0.701 504 14.2 45.9 0
10 1.6812 0.122 12 4.24 6.97 0
11 1.68092 0.014 1.11 0.309 0.0168 0
12 1.68092 0.00179 0.0215 0.3 0.000101 0
13 1.68092 0.000112 0.00634 0.3 8.26e-07 0
14 1.68092 1.36e-05 0.000382 0.3 7.62e-09 0
15 1.68092 1.18e-06 5.01e-05 0.3 7.28e-11 0
16 1.68092 1.23e-07 4.29e-06 0.3 7.13e-13 0
17 1.68092 1.17e-08 4.56e-07 0.3 1.32e-14 0
------------------------------------------------------------------------------------------
Termination condition: No improvement along the search direction with line search..
Number of iterations: 18, Number of function evaluations: 115
Status: Estimated using PEM
Fit to estimation data: 70.57%, FPE: 1.7379
モデルの適合を調べます。
sys.Report.Fit.FitPercent
ans =
70.567
sys は測定データに 70.63% 適合します。
入力引数
出力引数
アルゴリズム
PEM は、数値最適化を使用して "コスト関数" を最小化します。これは予測誤差の重み付きノルムで、スカラー出力に対して次のように定義されます。
ここで、"e(t)" はモデルの測定出力と推定出力の差です。線形モデルの場合、誤差は次のように定義されます。
ここで、"e(t)" はベクトル、コスト関数 はスカラー値です。添字 "N" は、コスト関数がデータ サンプル数の関数であり、"N" の値が大きいほど精度が高くなることを示しています。多出力モデルの場合、上記の方程式がより複雑になります。詳細については、System Identification: Theory for the User, Second Edition, by Lennart Ljung, Prentice Hall PTR, 1999 の 7 章を参照してください。
代替機能
各種のモデル構造に対する専用の推定コマンドを使用して pem と同じ結果が得られます。たとえば、状態空間モデルの推定には ssest(data,init_sys) を使用します。
バージョン履歴
R2006a より前に導入