arx
ARX、ARIX、AR、または ARI モデルのパラメーターの推定
構文
説明
AR モデルまたは ARX モデルの推定
sys = arx(tt,[na nb nk])tt の変数に含まれるデータを使用して、ARX モデルまたは AR idpoly モデル sys のパラメーターを推定します。最初の Nu 個の変数が入力として使用され、次の Ny 個の変数が出力として使用されます。Nu と Ny はそれぞれ nb と na の次元から決定されます。
AR モデルの場合は、入力信号がないため、sys = arx(tt,na) を使用します。この場合は、最初の Ny 個の変数を使用してモデルが適合されます。
arx は、最小二乗法と、[na nb nk] で指定された多項式の次数を使用して推定を行います。モデルのプロパティには、共分散 (パラメーターの不確かさ) および推定データと測定データの適合度が含まれます。
tt から特定の入力チャネルと出力チャネルを選択するには、名前と値の構文を使用して 'InputName' と 'OutputName' を対応する timetable 変数名に設定します。
sys = arx(u,y,[na nb nk])u,y 内の時間領域入力信号と出力信号を使用します。データのサンプル時間は 1 秒と仮定されます。サンプル時間を変更するには、名前と値の構文を使用して Ts を設定します。
sys = arx(data,[na nb nk])data 内の時間領域データまたは周波数領域データを使用します。この構文は特に、周波数領域データまたは周波数応答データを使用してモデルを推定する場合、またはデータ オブジェクトが提供する追加情報 (データのサンプル時間、実験のラベル付けなど) を利用する場合に使用します。
追加のオプションの指定
sys = arx(___,Name,Value)'IntegrateNoise',1 は、非定常外乱があるシステムに役立つ ARIX 構造または ARI 構造のモデルを推定します。この構文では、前述の任意の入力引数の組み合わせで使用できます。
推定される初期条件を返す
[ は、推定される初期条件を sys,ic] = arx(___)initialCondition オブジェクトとして返します。この構文は、モデルの応答を同じ推定入力データを使用してシミュレートまたは予測し、その応答を同じ推定出力データと比較する場合に使用します。初期条件を組み込むことで、シミュレーションの最初の部分における一致が高まります。
例
指定した ARX モデルに基づいて出力データを生成し、その出力データを使用してモデルを推定します。
ARX 構造をもつ多項式モデル sys0 を指定します。モデルには 1 サンプルの入力遅延が含まれており、B 多項式の先頭のゼロで表現されています。
A = [1 -1.5 0.7]; B = [0 1 0.5]; sys0 = idpoly(A,B);
ランダムなバイナリ ノイズを含む測定入力信号 u と正規分布ノイズを含む誤差信号 e を生成します。これらの信号を使用して、sys0 の測定出力信号 y をシミュレートします。
u = iddata([],idinput(300,'rbs'));
e = iddata([],randn(300,1));
y = sim(sys0,[u e]);y と u を単一の iddata オブジェクト z に結合します。z から元のモデルと同じ多項式の次数および入力遅延を使用して新しい ARX モデルを推定します。
z = [y,u]; sys = arx(z,[2 2 1])
sys =
Discrete-time ARX model: A(z)y(t) = B(z)u(t) + e(t)
A(z) = 1 - 1.524 z^-1 + 0.7134 z^-2
B(z) = z^-1 + 0.4748 z^-2
Sample time: 1 seconds
Parameterization:
Polynomial orders: na=2 nb=2 nk=1
Number of free coefficients: 4
Use "polydata", "getpvec", "getcov" for parameters and their uncertainties.
Status:
Estimated using ARX on time domain data "sys0".
Fit to estimation data: 81.36% (prediction focus)
FPE: 1.025, MSE: 0.9846
Model Properties
出力に、推定の他の詳細と一緒に、推定パラメーターを含む多項式が表示されます。Status の下の Fit to estimation data から、推定モデルの 1 ステップ先の予測精度が 80% を超えていることがわかります。
関数 arx を使用して時系列 AR モデルを推定します。AR モデルには測定入力はありません。
ノイズがある時系列 tt9 を含む timetable にあるデータを読み込みます。
load sdata9 tt9
[na nb nk] で na の次数のみを指定して、4 次 AR モデルを推定します。
sys = arx(tt9,4);
推定された A 多項式のパラメーターとデータに対する推定の適合度を調べます。
param = sys.Report.Parameters.ParVector
param = 4×1
-0.7923
-0.4780
-0.0921
0.4698
fit = sys.Report.Fit.FitPercent
fit = 79.4835
ARIX モデルのパラメーターを推定します。ARIX モデルは、積分ノイズを含む ARX モデルです。
ARX 構造をもつ多項式モデル sys0 を指定します。モデルには 1 サンプルの入力遅延が含まれており、B の先頭のゼロで表現されています。
A = [1 -1.5 0.7]; B = [0 1 0.5]; sys0 = idpoly(A,B);
ランダムなバイナリ入力信号 u と正規分布誤差信号 e を使用して、sys0 の出力信号をシミュレートします。
u = iddata([],idinput(300,'rbs'));
e = iddata([],randn(300,1));
y = sim(sys0,[u e]);出力信号を積分し、結果 yi を iddata オブジェクト zi に格納します。
yi = iddata(cumsum(y.y),[]); zi = [yi,u];
zi から ARIX モデルを推定します。名前と値のペアの引数 'IntegrateNoise' を true に設定します。
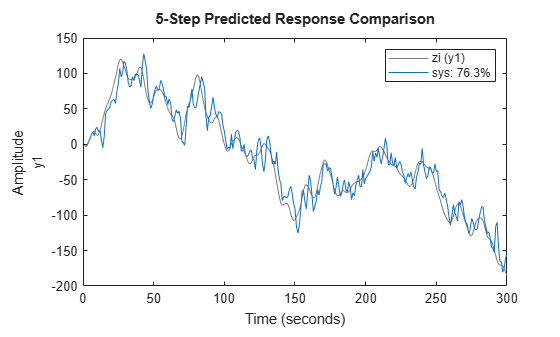
sys = arx(zi,[2 2 1],'IntegrateNoise',true);5 ステップの予測を使用してモデルの出力を予測し、結果を yi と比較します。
compare(zi,sys,5)
arxRegulを使用して正則化定数を自動で決定し、その値を次数 50 の FIR モデルの推定に使用します。
lambda と R の値を取得します。
load regularizationExampleData eData; orders = [0 50 0]; [lambda,R] = arxRegul(eData,orders);
返された lambda と R の値を正則化 ARX モデルの推定に使用します。
opt = arxOptions; opt.Regularization.Lambda = lambda; opt.Regularization.R = R; sys = arx(eData,orders,opt);
データを読み込みます。
load iddata1ic z1i
2 次 ARX モデル sys を推定し、ic で初期条件を返します。
na = 2; nb = 2; nk = 1; [sys,ic] = arx(z1i,[na nb nk]); ic
ic =
initialCondition with properties:
A: [2×2 double]
X0: [2×1 double]
C: [0 2]
Ts: 0.1000
ic は、sys の自由応答を状態空間形式で X0 の初期状態ベクトルにカプセル化する initialCondition オブジェクトです。ic は、sys を z1i 入力信号でシミュレートし、その応答を z1i 出力信号と比較する場合に組み込むことができます。
入力引数
名前と値の引数
出力引数
詳細
アルゴリズム
最小二乗の推定問題を構成する一連の過決定の線形方程式については QR 分解で解きます。
正則化を使用しない場合、ARX モデルのパラメーターのベクトル θ は次の正規方程式を解くことで推定されます。
ここで、J はリグレッサー行列、y は測定出力です。したがって、次のようになります。
正則化を使用する場合は正則化項が追加されます。
ここで、λ と R は正則化定数です。正則化定数の詳細については、arxOptions を参照してください。
回帰行列が arxOptions で指定された MaxSize よりも大きい場合、データがセグメント化され、データ セグメントに対して反復して QR 分解が実行されます。