c2d
連続時間から離散時間へモデルを変換
説明
例
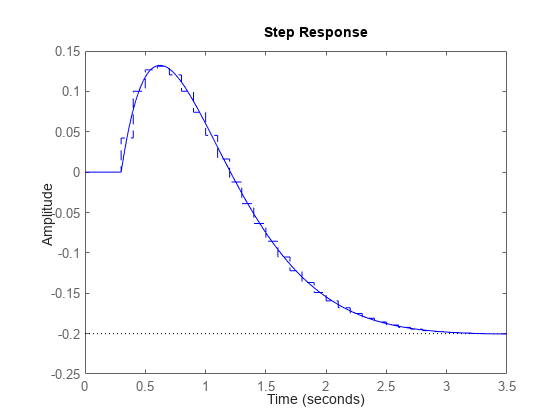
次の連続時間の伝達関数を離散化します。
このシステムには 0.3 秒の入力遅延があります。サンプル時間 Ts = 0.1 s での三角形 (1 次ホールド) 近似を使用してシステムを離散化します。
H = tf([1 -1],[1 4 5],'InputDelay', 0.3); Hd = c2d(H,0.1,'foh');
連続時間システムと離散化システムのステップ応答を比較します。
step(H,'-',Hd,'--')
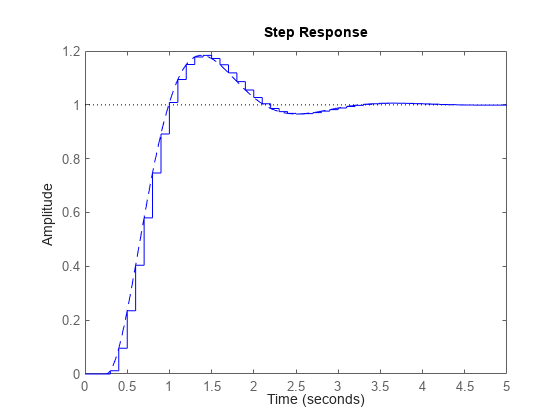
入力のゼロ次ホールドと 10 Hz のサンプリング レートを使用して、次の遅延伝達関数を離散化します。
h = tf(10,[1 3 10],'IODelay',0.25);
hd = c2d(h,0.1)hd =
0.01187 z^2 + 0.06408 z + 0.009721
z^(-3) * ----------------------------------
z^2 - 1.655 z + 0.7408
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
この例では、離散化されたモデル hd に 3 サンプリング周期の遅延があります。離散化アルゴリズムは、残る半周期の遅延を hd の係数に吸収します。
連続時間モデルと離散化モデルのステップ応答を比較します。
step(h,'--',hd,'-')
R2024a 以降
2 つの状態と 1 つの入力遅延をもつ連続時間状態空間モデルを作成します。
sys = ss(tf([1,2],[1,4,2])); sys.InputDelay = 2.7
sys =
A =
x1 x2
x1 -4 -2
x2 1 0
B =
u1
x1 2
x2 0
C =
x1 x2
y1 0.5 1
D =
u1
y1 0
Input delays (seconds): 2.7
Continuous-time state-space model.
Model Properties
Tustin 離散化手法と Thiran フィルターを使用してモデルを離散化し、非整数遅延をモデル化します。サンプル時間 Ts は 1 秒です。
opt = c2dOptions('Method','tustin','ThiranOrder',3); sysd1 = c2d(sys,1,opt)
sysd1 =
A =
x1 x2
x1 -0.4286 -0.5714
x2 0.2857 0.7143
B =
u1
x1 0.5714
x2 0.2857
C =
x1 x2
y1 0.2857 0.7143
D =
u1
y1 0.2857
(values computed with all internal delays set to zero)
Internal delays (sampling periods): 1 1 1
Sample time: 1 seconds
Discrete-time state-space model.
Model Properties
既定では、離散化されたモデルにおいて、関数は追加の遅延を内部遅延としてモデル化します。離散化されたモデルで追加の遅延を状態としてモデル化するには、c2dOptions の DelayModeling オプションを 'state' に設定します。
opt2 = c2dOptions('Method','tustin','ThiranOrder',3,'DelayModeling','state'); sysd2 = c2d(sys,1,opt2)
sysd2 =
A =
x1 x2 x3 x4 x5
x1 -0.4286 -0.5714 -0.00265 0.06954 2.286
x2 0.2857 0.7143 -0.001325 0.03477 1.143
x3 0 0 -0.2432 0.1449 -0.1153
x4 0 0 0.25 0 0
x5 0 0 0 0.125 0
B =
u1
x1 0.002058
x2 0.001029
x3 8
x4 0
x5 0
C =
x1 x2 x3 x4 x5
y1 0.2857 0.7143 -0.001325 0.03477 1.143
D =
u1
y1 0.001029
Sample time: 1 seconds
Discrete-time state-space model.
Model Properties
これにより、離散化されたモデルは、3 次 Thiran フィルターに対応する 3 つの追加状態 x3、x4、x5 を含むようになります。むだ時間をサンプル時間で除算すると 2.7 となるので、3 次 Thiran フィルター ('ThiranOrder' = 3) はむだ時間全体を近似できます。
連続時間伝達関数を推定し、離散化します。
load iddata1 sys1c = tfest(z1,2); sys1d = c2d(sys1c,0.1,'zoh');
2 次離散時間伝達関数を推定します。
sys2d = tfest(z1,2,'Ts',0.1);離散化された連続時間の伝達関数モデル sys1d の応答と、直接推定した離散時間モデル sys2d を比較します。
compare(z1,sys1d,sys2d)
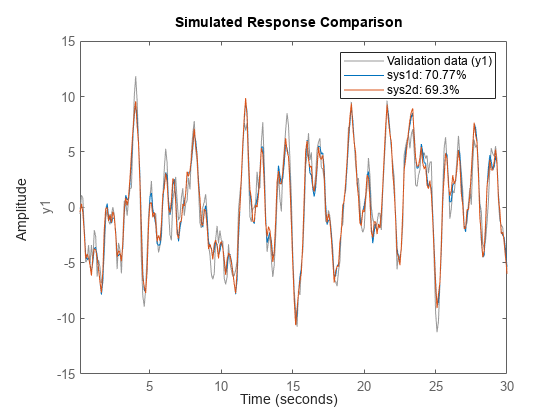
この 2 つのシステムはほぼ同じです。
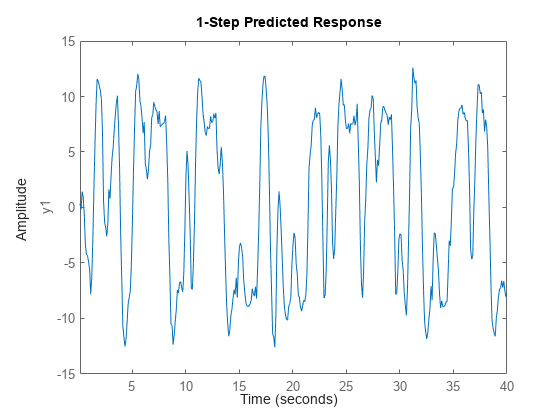
同定された状態空間モデルを離散化して、応答の 1 ステップ先の予測子を構築します。
推定データを使用して、連続時間で同定された状態空間モデルを作成します。
load iddata2
sysc = ssest(z2,4);sysc の 1 ステップ先の予測応答を予測します。
predict(sysc,z2)
モデルを離散化します。
sysd = c2d(sysc,0.1,'zoh');離散化モデル sysd から予測子モデルを作成します。
[A,B,C,D,K] = idssdata(sysd); Predictor = ss(A-K*C,[K B-K*D],C,[0 D],0.1);
Predictor は測定した出力信号と入力信号 ([z1.y z1.u]) を使用して、sysc の 1 ステップ先を予測した応答を計算する 2 入力モデルです。
予測子モデルをシミュレートし、predict コマンドと同じ応答を得ます。
lsim(Predictor,[z2.y,z2.u])
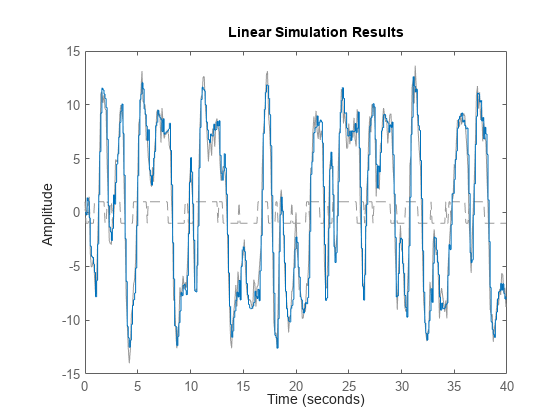
予測子モデルのシミュレーションの応答は、predict(sysc,z2) と同じになります。
入力引数
出力引数
バージョン履歴
R2006a より前に導入参考
c2dOptions | d2c | d2d | thiran (Control System Toolbox) | translatecov