quaternion
quaternion 配列の作成
説明
四元数とは、3 次元の回転および方向に使用される、4 つの部分からなる多元数です。
四元数は、 の形式で表現されます。ここで、a、b、c、d の各部分は実数であり、i、j、k は等式 i2 = j2 = k2 = ijk = −1 を満たす基底元です。
H で示される四元数の集合は、実数上の 4 次元ベクトル空間 R4 内で定義されます。H の要素にはそれぞれ、基本要素 i、j、および k の線形結合に基づいた一意な表現があります。
3 次元での回転はすべて、回転の軸と、その軸を中心とした角度によって表現できます。四元数が回転行列より優れている点は、回転の軸と角度が解釈しやすいことです。たとえば、R3 内の点について考えます。この点を回転するには、回転の軸と回転の角度を定義します。
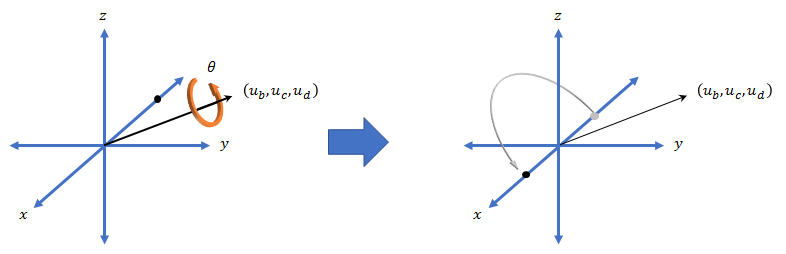
回転を四元数で表現すると、 として表すことができます。ここで θ は回転角度であり、[ub、uc、および ud] は回転軸です。
作成
構文
説明
quat = quaternion()
quat = quaternion(A,B,C,D)A、B、C、および D から取得されます。すべての入力が、同じサイズ、同じデータ型でなければなりません。
quat = quaternion(RV,"rotvec")RV の N 行 3 列の行列から N 行 1 列の quaternion 配列を作成します。RV の各行がそれぞれ 1 つの回転ベクトル (ラジアン単位) を表します。
quat = quaternion(RV,"rotvecd")RV の N 行 3 列の行列から N 行 1 列の quaternion 配列を作成します。RV の各行がそれぞれ 1 つの回転ベクトル (度単位) を表します。
quat = quaternion(transformation)transformation から quaternion 配列を作成します。
quat = quaternion(rotation)rotation から quaternion 配列を作成します。
入力引数
四元数の各部分。同じサイズの 4 つのコンマ区切りのスカラー、行列、または多次元配列として指定します。
例: quat = quaternion(1,2,3,4) は、1 + 2i + 3j + 4k の形式の四元数を作成します。
例: quat = quaternion([1,5],[2,6],[3,7],[4,8]) は、quat(1,1) = 1 + 2i + 3j + 4k および quat(1,2) = 5 + 6i + 7j + 8k である 1 行 2 列の quaternion 配列を作成します。
データ型: single | double
四元数の各部分の行列。N 行 4 列の行列として指定します。行はそれぞれ別々の四元数を表します。列はそれぞれ別々の四元数の部分を表します。
例: quat = quaternion(rand(10,4)) は、10 行 1 列の quaternion 配列を作成します。
データ型: single | double
回転ベクトルの行列。N 行 3 列の行列として指定します。RV の各行は、回転ベクトルの [X Y Z] 要素を表します。回転ベクトルは、回転の角度 (ラジアン単位または度単位) でスケーリングされた回転の軸を表す単位ベクトルです。
この構文を使用するには、1 つ目の引数を回転ベクトルの行列として、2 つ目の引数を "rotvec" または "rotvecd" として指定します。
例: quat = quaternion(rand(10,3),"rotvec") は、10 行 1 列の quaternion 配列を作成します。
データ型: single | double
回転行列の配列。3 行 3 列の行列または 3×3×N の配列として指定します。配列の各ページはそれぞれ別々の回転行列を表します。
例: quat = quaternion(rand(3),"rotmat","point")
例: quat = quaternion(rand(3),"rotmat","frame")
データ型: single | double
回転行列のタイプ。"point" または "frame" によって指定します。
例: quat = quaternion(rand(3),"rotmat","point")
例: quat = quaternion(rand(3),"rotmat","frame")
データ型: char | string
オイラー角の行列。N 行 3 列の行列として指定します。"euler" 構文を使用する場合は、E をラジアン単位で指定します。"eulerd" 構文を使用する場合は、E を度単位で指定します。
例: quat = quaternion(E,"euler","YZY","point")
例: quat = quaternion(E,"euler","XYZ","frame")
データ型: single | double
回転シーケンス。3 要素の文字ベクトルとして指定します。
"YZY""YXY""ZYZ""ZXZ""XYX""XZX""XYZ""YZX""ZXY""XZY""ZYX""YXZ"
ある点の座標系が、座標系の回転を使用して回転されたときに、新しい座標を特定すると仮定します。この点は、元の座標系では以下のように定義されています。
point = [sqrt(2)/2,sqrt(2)/2,0];
オイラー角表現 [45,45,0] を使用して、点を回転します。点を回転するには、次の 2 つの異なる回転シーケンスを使用します。
四元数回転子を作成し、"ZYX" シーケンスを指定する場合、座標系はまず z 軸を中心に 45 度回転され、次に新しい y 軸を中心に 45 度回転されます。
quatRotator = quaternion([45,45,0],"eulerd","ZYX","frame"); newPointCoordinate = rotateframe(quatRotator,point)
newPointCoordinate = 0.7071 -0.0000 0.7071
四元数回転子を作成し、"YZX" シーケンスを指定する場合、座標系はまず y 軸を中心に 45 度回転され、次に新しい z 軸を中心に 45 度回転されます。
quatRotator = quaternion([45,45,0],"eulerd","YZX","frame"); newPointCoordinate = rotateframe(quatRotator,point)
newPointCoordinate = 0.8536 0.1464 0.5000
データ型: char | string
変換。se3 オブジェクトとして、あるいは se3 オブジェクトの N 要素配列として指定します。N は変換の合計数です。
quaternion オブジェクトは変換の並進成分を無視し、変換のうち回転の 3 行 3 列の部分行列を quaternion に変換します。
正規直交回転。so3 オブジェクトとして、あるいは so3 オブジェクトの N 要素配列として指定します。N は回転の合計数です。