euler
四元数をオイラー角 (ラジアン) に変換
説明
eulerAngles = euler(quat,rotationSequence,rotationType)quat を、オイラー角を表す N 行 3 列の行列に変換します。
例
入力引数
オイラー角に変換する四元数。quaternion オブジェクト、または任意の次元の quaternion オブジェクトの配列として指定します。
オイラー角表現の回転シーケンス。以下のいずれかの値として指定します。
"YZY""YXY""ZYZ""ZXZ""XYX""XZX""XYZ""YZX""ZXY""XZY""ZYX""YXZ"
回転シーケンスは、軸を中心とした回転の順序を定義します。たとえば、"YZX" という回転シーケンスを指定した場合、次のようになります。
最初の回転は、y 軸を中心にして行われます。
2 番目の回転は、新しい z 軸を中心にして行われます。
3 番目の回転は、新しい x 軸を中心にして行われます。
データ型: char | string
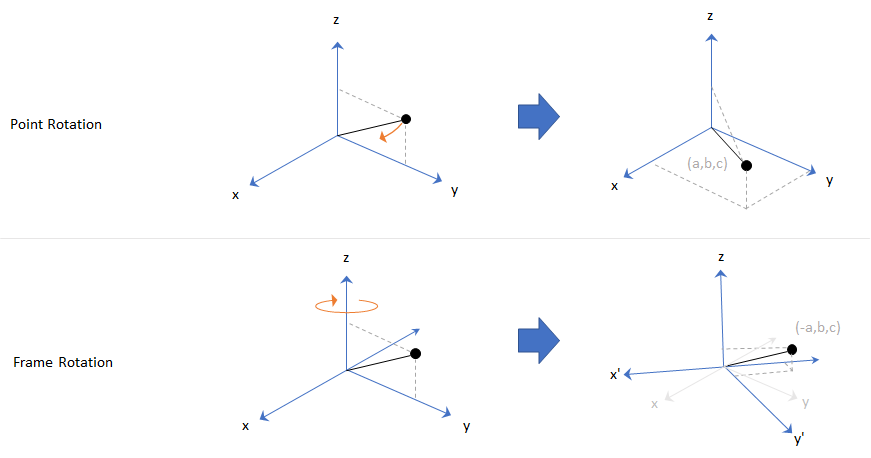
回転のタイプ。"point" または "frame" として指定します。
点の回転では、座標系は静的であり、点が移動します。座標系の回転では、点は静的であり、座標系が移動します。点の回転と座標系の回転は同等の角変位を定義しますが、方向は逆です。
データ型: char | string
出力引数
拡張機能
バージョン履歴
R2019b で導入