rotateframe
四元数の座標系の回転
説明
rotationResult = rotateframe(quat,cartesianPoints)quat を使用して直交座標点の基準座標系を回転します。四元数の要素は回転に使用する前に正規化されます。

例
3 次元で点を定義します。点の座標は、常に "x"、"y"、"z" の順で指定します。可視化しやすくするために、"x"-"y" 平面上の点を定義します。
x = 0.5; y = 0.5; z = 0; plot(x,y,"ko") hold on axis([-1 1 -1 1])
"z" 軸を中心とする 2 つの異なる回転を指定する quaternion ベクトルを作成します。1 つは座標系を 45 度回転し、もう 1 つは点を -90 度回転します。rotateframe を使用して回転を実行します。
quat = quaternion([0,0,pi/4; ... 0,0,-pi/2],"euler","XYZ","frame"); rereferencedPoint = rotateframe(quat,[x,y,z])
rereferencedPoint = 2×3
0.7071 -0.0000 0
-0.5000 0.5000 0
再参照された点をプロットします。
plot(rereferencedPoint(1,1),rereferencedPoint(1,2),"bo") plot(rereferencedPoint(2,1),rereferencedPoint(2,2),"go")
3 次元空間で 2 つの点を定義します。これらの点を再参照する四元数を定義します。最初に基準座標系を "z" 軸を中心に 30 度回転してから、新しい "y" 軸を中心に 45 度回転します。
a = [1,0,0]; b = [0,1,0]; quat = quaternion([30,45,0],"eulerd","ZYX","point");
rotateframe で四元数の回転演算子を使用して両方の点を参照します。結果を表示します。
rP = rotateframe(quat,[a;b])
rP = 2×3
0.6124 -0.3536 0.7071
0.5000 0.8660 -0.0000
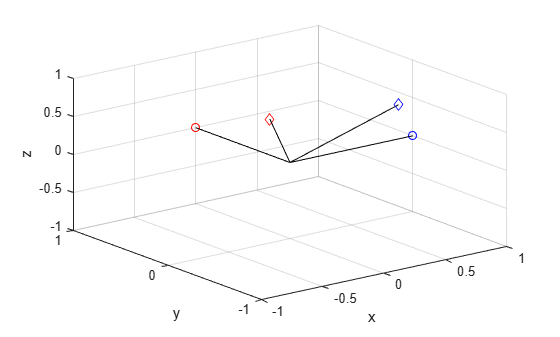
点の元の向きと回転後の向きを可視化します。原点から各点までの線を可視化のために描画します。
plot3(a(1),a(2),a(3),"bo"); hold on grid on axis([-1 1 -1 1 -1 1]) xlabel("x") ylabel("y") zlabel("z") plot3(b(1),b(2),b(3),"ro"); plot3(rP(1,1),rP(1,2),rP(1,3),"bd") plot3(rP(2,1),rP(2,2),rP(2,3),"rd") plot3([0;rP(1,1)],[0;rP(1,2)],[0;rP(1,3)],"k") plot3([0;rP(2,1)],[0;rP(2,2)],[0;rP(2,3)],"k") plot3([0;a(1)],[0;a(2)],[0;a(3)],"k") plot3([0;b(1)],[0;b(2)],[0;b(3)],"k")
入力引数
出力引数
アルゴリズム
四元数の座標系の回転では、指定された四元数に従って元の基準座標系を回転し、R3 で指定された点を再参照します。
ここで、q は四元数であり、* は共役を表します。u は回転する点であり、四元数として指定します。
便宜上、関数 rotateframe は R3 の点を受け取り、R3 の点を返します。任意の四元数 q = a + bi + cj + dk と任意の座標 [x,y,z] が指定された関数呼び出しを考えます。
point = [x,y,z]; rereferencedPoint = rotateframe(q,point)
rotateframe は次の操作を実行します。
点 [x,y,z] を四元数に変換します。
四元数 q を正規化します。
回転を適用します。
四元数の出力 vq を変換して R3 に戻します。
拡張機能
バージョン履歴
R2019b で導入