Navigation Toolbox
Navigation Toolbox™ は、センサー モデリングおよびセンサー キャリブレーション、モーション プランニング、自己位置推定と環境地図作成の同時実行 (SLAM)、慣性ナビゲーションのためのアルゴリズムと解析ツールを提供します。このツールボックスには位置推定用のセンサー モデルとアルゴリズムが含まれています。IMU、GPS、およびホイール エンコーダーのセンサー データのシミュレーションと可視化を行い、マルチセンサー姿勢推定用のフュージョン フィルターを調整することができます。
このツールボックスには、カスタマイズ可能な探索とサンプリングベースのパス プランナー、およびパスの検証と比較に使用するメトリクスが含まれています。SLAM マップ ビルダー アプリにより、2 次元および 3 次元地図表現を作成し、SLAM アルゴリズムを使用してマップを生成し、マップの生成を対話的に可視化してデバッグすることができます。
航空機、自動運転、ロボティクス、および家電製品のアプリケーション向けの参考例が提供されています。ナビゲーション アルゴリズムをハードウェアに直接展開して (MATLAB® Coder™ または Simulink® Coder を使用)、このアルゴリズムをテストできます。
Navigation Toolbox 入門
Navigation Toolbox の基礎を学ぶ
座標変換と軌跡
四元数、回転行列、変換、軌跡の生成
センサー モデル
IMU、GPS、および距離センサーのシミュレーションとキャリブレーション
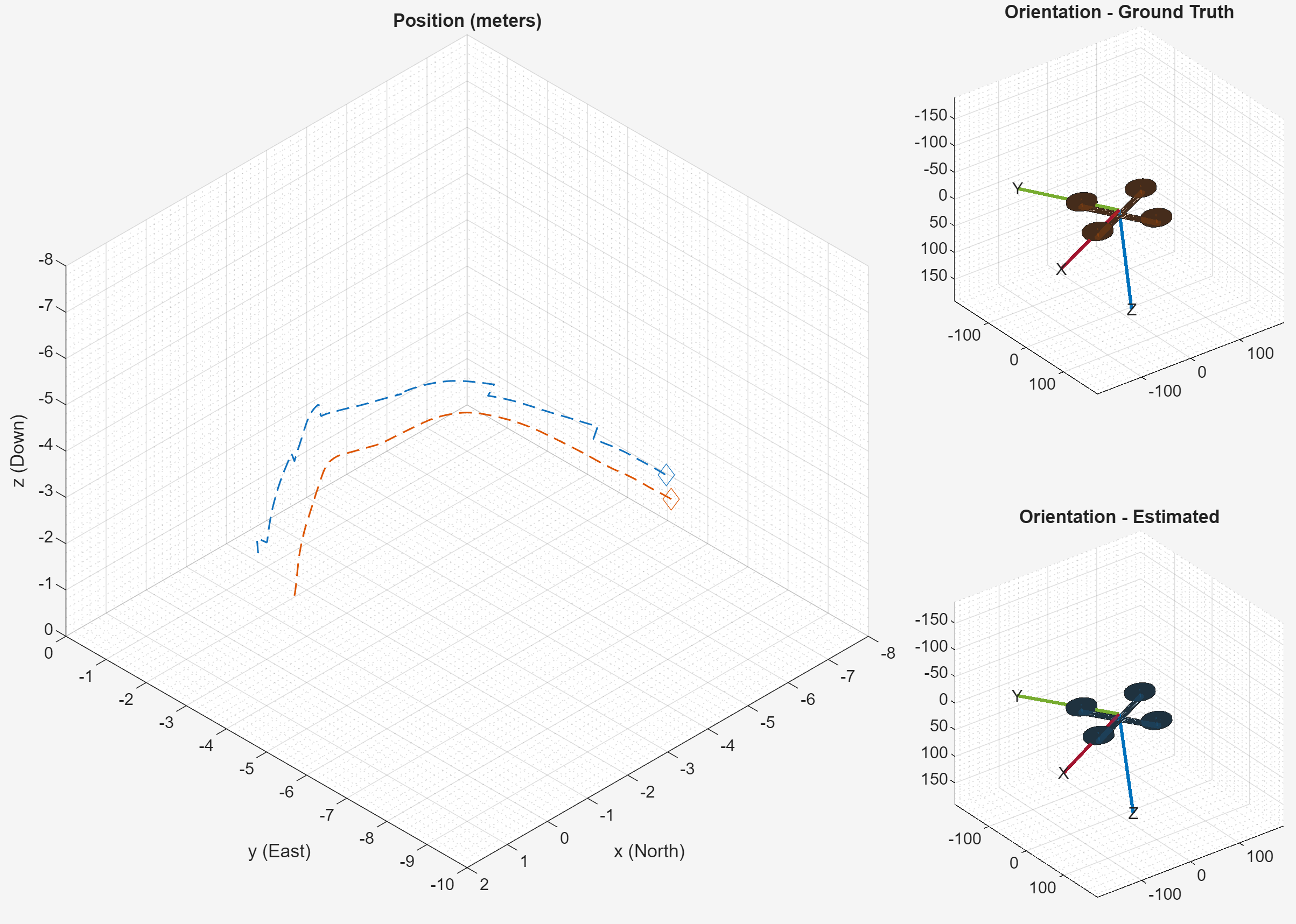
慣性センサー フュージョン
IMU と GPS による慣性ナビゲーション、センサー フュージョン、カスタム フィルター調整
GNSS 測位
GNSS データを利用した位置推定
位置推定アルゴリズム
粒子フィルター、スキャン マッチング、モンテカルロ位置推定、姿勢グラフ、オドメトリ
地図作成
2 次元および 3 次元の占有マップ、エゴセントリック マップ、レイキャスティング
SLAM
2 次元および 3 次元の自己位置推定と環境地図作成の同時実行
モーション プランニング
グローバル パス プランニングおよびローカル パス プランニング、パス追従、障害物回避、パス メトリクス
コードの生成と展開
アルゴリズムを高速化する C/C++ コードと MEX 関数の生成