SLAM
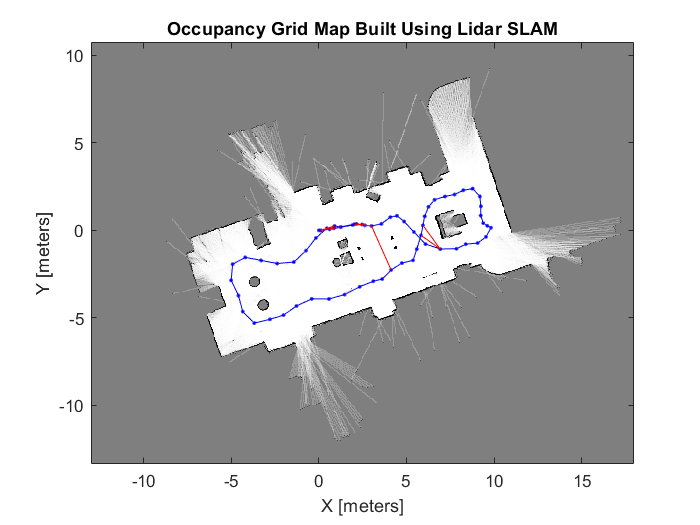
自己位置推定と環境地図作成の同時実行 (SLAM) は、地図作成とのアルゴリズムの両方を使用して、マップを作成すると同時にそのマップ内におけるビークルの位置を推定します。LiDAR スキャンとオドメトリ姿勢推定を処理する独自の SLAM アルゴリズムを調整し、対話的にマップを作成するには、lidarSLAM を使用します。ログに記録されフィルター処理されたデータを受け取り、SLAM を使用してマップを作成するには buildMap を使用します。SLAM マップ ビルダー アプリでは、相対姿勢の変更とスキャンの調整を手動で行ってマップの精度を向上できます。
SLAM とは何か、および他の MATLAB® ツールボックスの他の SLAM ツールの詳細については、SLAM とは? を参照してください。
アプリ
| SLAM マップ ビルダー | LiDAR ベースの SLAM を使用して 2 次元グリッド マップを作成 |
関数
トピック
- Choose SLAM Workflow Based on Sensor Data
Choose the right simultaneous localization and mapping (SLAM) workflow and find topics, examples, and supported features.
- Factor Graph for SLAM
Learn about factor graph and how it use it for SLAM applications.
注目の例

Performant and Deployable Monocular Visual SLAM
Visual simultaneous localization and mapping (vSLAM) refers to the process of calculating the position and orientation of a camera with respect to its surroundings while simultaneously mapping the environment. Applications for vSLAM include augmented reality, robotics, and autonomous driving. In this example, the algorithm uses only visual inputs from the camera.

Build a Map from Lidar Data Using SLAM
Process 3-D lidar data from a sensor on a vehicle to progressively build a map and estimate the trajectory using SLAM.

Monocular Visual-Inertial Odometry (VIO) Using Factor Graph
Implement monocular visual-inertial odometry to localize a UAV using camera and IMU data, optimized by a factor graph.

Factor Graph-Based Pedestrian Localization with IMU and GPS Sensors
Estimate the position of a pedestrian using logged sensor data from an inertial measurement unit (IMU) and Global Positioning System (GPS) receiver and a factor graph.

Landmark SLAM Using AprilTag Markers
Combine robot odometry data and AprilTag markers to implement SLAM with a factor graph and pose graph, and compare the results.

Map Indoor Area Using Lidar SLAM and Factor Graph
Implement offline lidar SLAM on collected lidar scans to map an indoor area using a factor graph and lidar scan map.

Build and Deploy Visual SLAM Algorithm with ROS in MATLAB
Implement a monocular visual SLAM algorithm to estimate camera poses and deploy generated C++ code using ROS.

Simulate RGB-D Visual SLAM System with Cosimulation in Gazebo and Simulink
Use RGB and depth images from a robot to simulate a RGB-D visual SLAM system in Simulink.

EKF ベースのランドマーク SLAM
拡張カルマン フィルター アルゴリズムを使用してランドマーク SLAM を実装して、ビークルのパスを追跡し、周囲のマップを作成する。
LIDAR スキャンでの自己位置推定と環境地図作成の同時実行 (SLAM) の実装
姿勢グラフと LiDAR スキャンの一連のコレクションを使用してオフライン SLAM を実装し、環境のマップを作成する。