SLAM マップ ビルダー
LiDAR ベースの SLAM を使用して 2 次元グリッド マップを作成
説明
SLAM マップ ビルダー アプリは、記録された LiDAR スキャンおよびオドメトリ センサーのデータを読み込み、自己位置推定と環境地図作成の同時実行 (SLAM) アルゴリズムを使用して 2 次元占有グリッドを作成します。インクリメンタル スキャン マッチングは、マップを作成するためにスキャンを揃えて重ね合わせます。ループ閉じ込み検出は、以前に通った位置を検出してマップ全体を調整することにより、ビークルのオドメトリのドリフトを調整します。スキャン マッチング アルゴリズムとループ閉じ込み検出について、手動による調整が必要になることがあります。アプリを使用して手動でスキャンを揃え、ループ閉じ込みを変更することで、マップ全体の精度を高めることができます。自動マップ作成を改善するために SLAM アルゴリズムの設定を調整することもできます。
アプリの使用:
| rosbag ログ ファイルを読み込むには、[インポート] 、 [rosbag からインポート] を選択します。rosbag ファイルを選択し、[開く] をクリックします。[インポート] タブが開きます。詳細については、rosbag のインポートとフィルター処理を参照してください。 ワークスペースからデータを読み込むには、[インポート] 、 [ワークスペースからインポート] を選択します。提供されるドロップ ダウンを使用して、[スキャン] と [姿勢] の変数を選択します。変数は関数 |
| SLAM アルゴリズムの設定を調整するには、[SLAM の設定] を使用します。既定値が提供されますが、センサーやデータに応じてそれらの設定の調整が必要になることがあります。調整が必要な最も重要な値は [ループ閉じ込みのしきい値] です。詳細については、SLAM の設定の調整を参照してください。 |
| SLAM マップ作成プロセスを開始するには、[作成] をクリックします。作成プロセスでは、インクリメンタル スキャン マッチングを使用してマップのスキャンが揃えられ、以前と同じ位置を通るとループ閉じ込みが識別され、姿勢が調整されます。マップ作成プロセス中は、いつでも [一時停止] をクリックして、手動でインクリメンタル スキャンを揃えたり、ループ閉じ込みを変更したりできます。 |
| 現在選択されているフレームの相対姿勢を変更したり、スキャンを前のスキャンに揃えたりするには、[インクリメンタル マッチ] をクリックします。現在のフレームの検出されたループ閉じ込みを変更または無視するには、[ループ閉じ込み] をクリックします。下部のスライダーを使用して、スキャン マッチングやループ閉じ込みが正確でない領域までスクロールして戻ります。スキャンやループ閉じ込みはいくつでも変更できます。詳細については、インクリメンタル スキャンとループ閉じ込みの変更を参照してください。 |
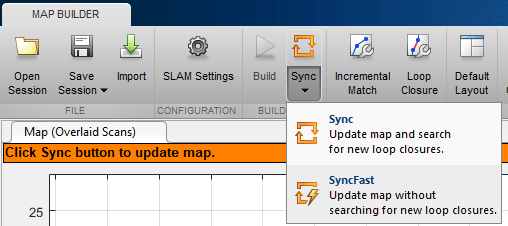
| マップを変更した後、[同期] をクリックしてスキャン マップ内のすべての姿勢を更新します。[同期] には、新しいループ閉じ込みを検索する [同期] と、ループ閉じ込みの検索をスキップしてスキャン マップの更新だけを行う [高速同期] の 2 つのオプションがあります。詳細については、マップの同期を参照してください。 |
| マップが満足のいく外観になったら、[占有グリッドのエクスポート] をクリックしてマップを M ファイルにエクスポートするか、マップをワークスペースに保存します。マップは 2 次元確率占有グリッドとして occupancyMap オブジェクトに出力されます。 |
| [セッションを開く] を使用して、保存してある既存のアプリ セッションを開くことができます。[マップ ビルダー] タブで、[セッションの保存] を使用して進行状況を M ファイルに保存できます。 |

SLAM マップ ビルダー アプリを開く
MATLAB® ツールストリップ: [アプリ] タブの [ロボティクスと自律システム] にある [SLAM マップ ビルダー] をクリックします。
MATLAB コマンド ウィンドウ: 「
slamMapBuilder」と入力します。
例
SLAM マップ ビルダー アプリでは、自己位置推定と環境地図作成の同時実行 (SLAM) アルゴリズムを使用して LiDAR スキャンから占有グリッドを作成できます。スキャン マッチングで姿勢を推定し、姿勢グラフの最適化にループ閉じ込みを使用することでマップが作成されます。この例では、LiDAR スキャン データの rosbag を読み込み、データをフィルター処理してマップを作成するためのワークフローを示します。インクリメンタル スキャン マッチを調整し、ループ閉じ込みを変更することでスキャン マップを調整します。
LiDAR スキャン データの読み込み
サンプル MAT ファイルをワークスペースに読み込みます。これには、変数 scans が lidarScan オブジェクトの cell 配列として格納されています。
load slamLidarScans.matアプリを開く
[アプリ] タブの [ロボティクスと自律システム] にある [SLAM マップ ビルダー] をクリックします。
また、関数 slamMapBuilder を呼び出すこともできます。
slamMapBuilder
LiDAR スキャンのインポート
[インポート]、[ワークスペースからインポート] をクリックしてスキャンを読み込みます。rosbag として格納されたデータは、ROS Toolbox ライセンスで読み込むことができます。

[スキャン] ドロップ ダウンで変数 scans を選択します。
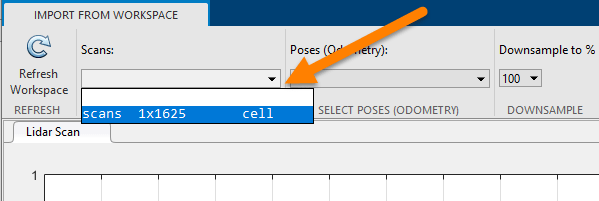
ツール バーで [% までダウンサンプリング] を 10 に設定します。データのサンプルを均等にダウンサンプリングすることで、SLAM アルゴリズムの計算時間が短くなります。この例では、10% は 5 番目のスキャンごとです。[適用] をクリックします。
下部のスライダーまたは矢印キーを使用してスキャンをプレビューします。
![]()
インポートが完了したら、[閉じる] をクリックします。
SLAM の設定の調整
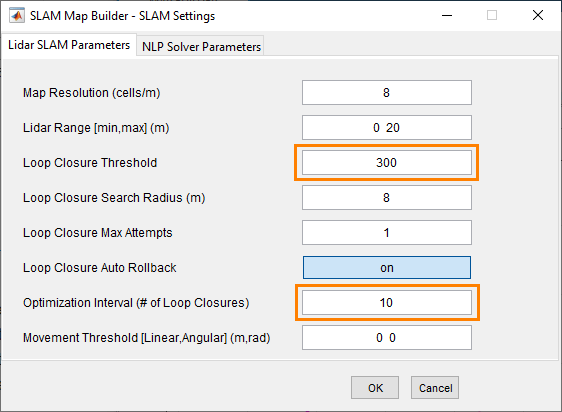
SLAM アルゴリズムは、[SLAM の設定] ダイアログ ボックスを使用して調整できます。センサーの仕様、環境、および用途に応じてパラメーターを調整してください。この例では、[ループ閉じ込みのしきい値] を 200 から 300 に増やします。このようにしきい値を大きくすると、検出されたループ閉じ込みを受け入れて使用される可能性が低くなります。[最適化の間隔] は 10 に設定します。ループ閉じ込みを 10 個受け入れるたびに、ドリフトを考慮して姿勢グラフが最適化されます。
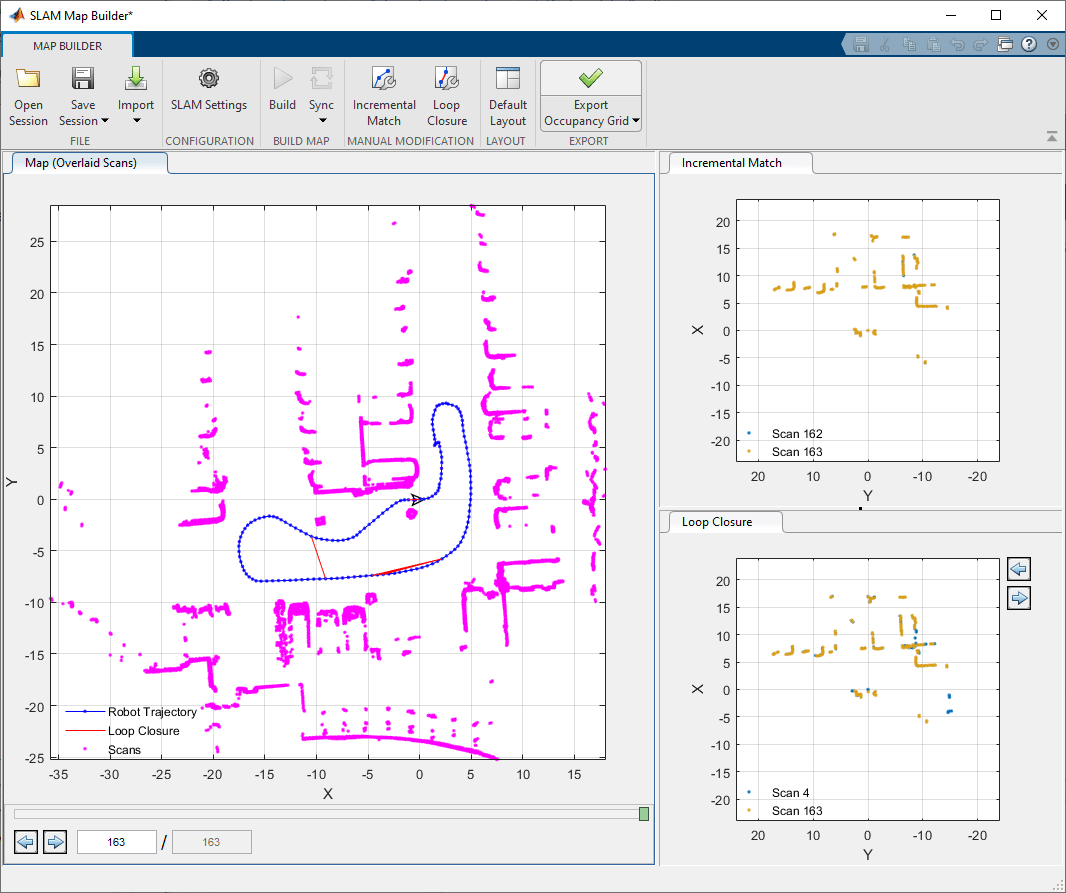
マップの作成
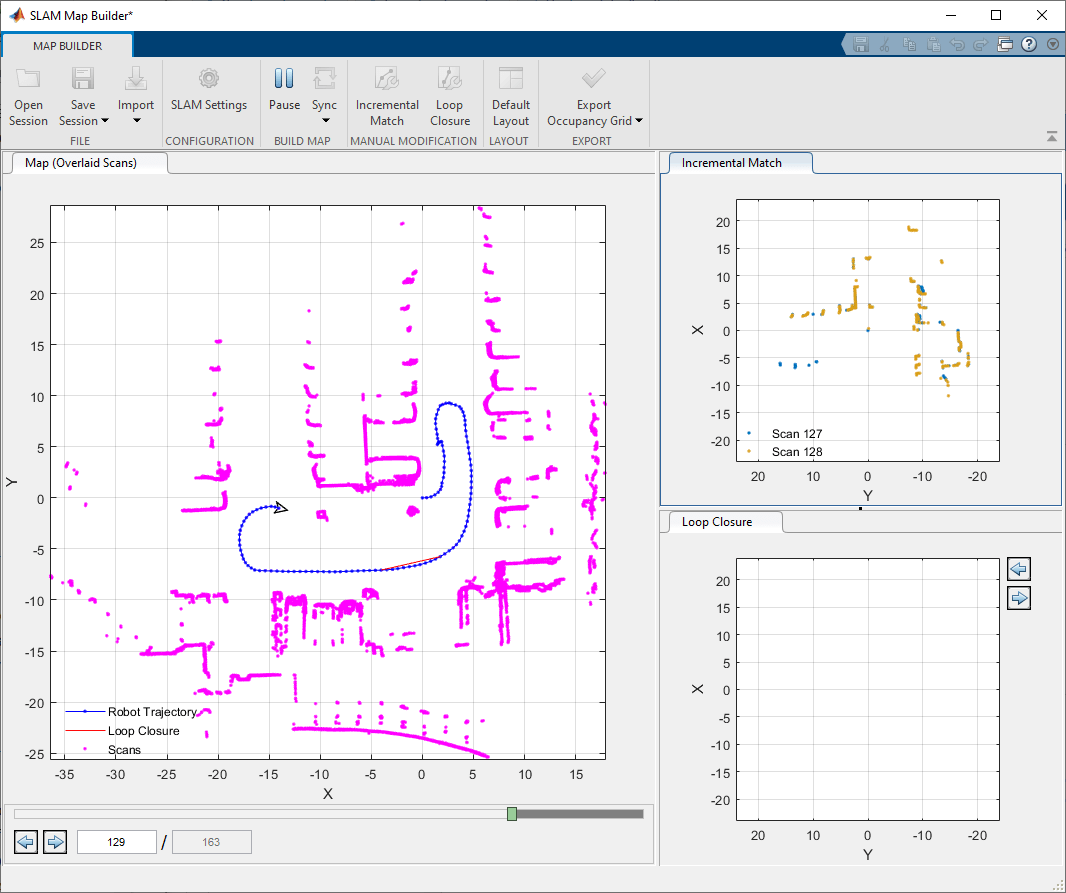
データのフィルター処理と SLAM アルゴリズム設定の設定が完了したら、[作成] をクリックします。マップを作成するためのスキャンの処理がアプリで開始されます。スライダーが進行し、マップにスキャンが重ねられていく様子が表示されるはずです。推定されるロボットの軌跡が同じスキャン マップにプロットされます。インクリメンタル スキャン マッチは [インクリメンタル マッチ] ペインに表示されます。ループ閉じ込みが検出されるたびに、重ね合わされた 2 つのスキャンが [ループ閉じ込み] ペインに表示されます。
スキャン マッチまたはループ閉じ込みの調整
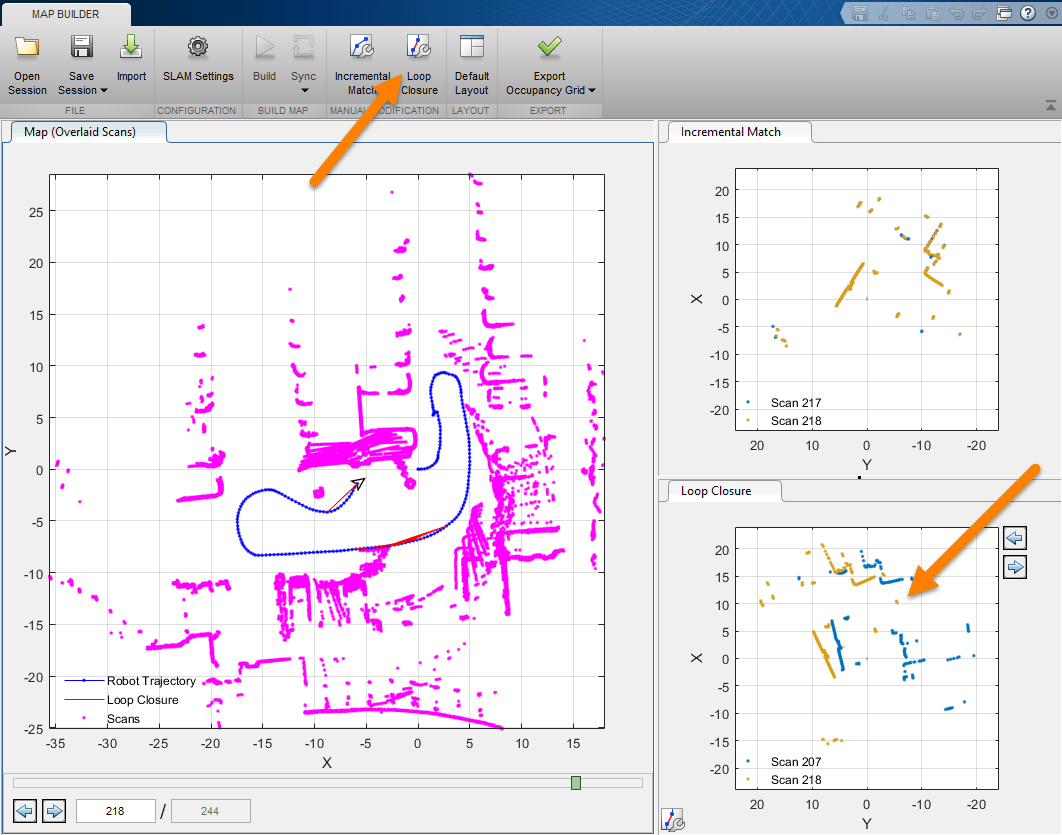
作成プロセス中にマップに歪みが見られる場合や、インクリメンタル マッチまたはループ閉じ込みがオフになっているように思われる場合は、気付いた時点で [一時停止] をクリックして調整が必要なスキャンを選択します。スキャンの変更は作成プロセスの最後にも実行できます。矢印キーまたはスライダーを使用して、ファイル内で歪みが最初に生じたポイントに移動します。[インクリメンタル マッチ] ボタンまたは [ループ閉じ込み] ボタンをクリックして、現在表示されているスキャンの姿勢を調整します。このセクションで示している不適切なループ閉じ込みは、例示のみを目的とした人為的なものです。
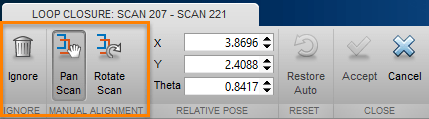
[ループ閉じ込み] ボタンをクリックします。ループ閉じ込みの相対姿勢を変更するためのタブが開きます。
ループ閉じ込みを完全に無視するには、[無視] をクリックします。それ以外の場合は、スキャンの相対姿勢をスキャンが揃うまで手動で変更します。
[スキャンの移動] または [スキャンの回転] をクリックし、Figure 内でクリックしてドラッグすることで 2 つのスキャンを揃えます。完了したら [確定] をクリックします。これは複数のスキャンについて実行できます。
スキャンの姿勢をインクリメンタル マッチとループ閉じ込みに応じて変更したら、[同期] をクリックして変更を適用します。既にすべてのスキャンの処理が完了している場合は、[高速同期] で新しいループ閉じ込みを検索せずにマップを更新すると計算時間を短縮できます。
占有グリッドのエクスポート
変更を同期してマップの作成を終了すると、完全に重ねられたスキャン マップがロボットの軌跡と共に表示されるはずです。
[占有グリッドのエクスポート] をクリックして、環境の最終的な占有マップをoccupancyMapオブジェクトとして取得します。マップをワークスペースまたは MAT ファイルのいずれかにエクスポートします。エクスポートする前に目的のフレームまでスクロールして戻り、[現在選択されているスキャンまで] を選択すると、スキャンのサブセットからマップを作成できます。
格納した占有マップを表示します。
load("slamMapBuilderOccMap.mat") show(myOccMap) title("Built Occupancy Map")
![Figure contains an axes object. The axes object with title Built Occupancy Map, xlabel X [meters], ylabel Y [meters] contains an object of type image.](../../examples/nav/win64/BuildAndTuneAMapUsingLidarScansWithSLAMExample_10.png)
[セッションの保存] ボタンを使用して SLAM マップ ビルダー アプリ セッションを保存することもできます。アプリの現在の状態が .mat ファイルに書き込まれ、後で [セッションを開く] を使用して読み込むことができます。
関連する例
パラメーター
プログラムでの使用
詳細
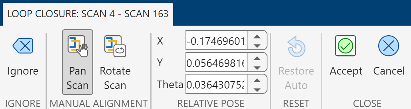
このアプリでは、インクリメンタル スキャンの変更と検出されたループ閉じ込みの調整を手動で実行できます。マップの作成後にスキャンが適切に揃っていないことに気付いた場合は、[インクリメンタル マッチ] ボタンおよび [ループ閉じ込み] ボタンをクリックして変更タブを開きます。変更ツールストリップ ボタンを使用してスキャン間の相対姿勢を調整します。
無視 –– ループ閉じ込みを変更する際、ループ閉じ込みが正しくない場合は単純に無視できます。無視したループ閉じ込みが同じアプリ セッションで検出された場合、アルゴリズムによって常に破棄されます。インクリメンタル スキャン マッチは無視できません。
スキャンの移動 –– 姿勢を手動でシフトするには、このボタンをクリックします。選択した後、マップ内でクリックしてドラッグすることでスキャンをシフトし、それらを適切に重ね合わせます。満足のいく配置になるまで、スキャンのすべての点を揃えます。[相対姿勢] セクションで [X] と [Y] の位置を手動で指定することもできます。
スキャンの回転 –– 姿勢を手動で回転するには、このボタンをクリックします。選択した後、マップ内でクリックしてドラッグすることでスキャンを回転し、それらを適切に重ね合わせます。満足のいく配置になるまで、スキャンのすべての点を揃えます。[相対姿勢] セクションで [Theta] の位置を手動で指定することもできます。
バージョン履歴
R2019b で導入