ベクトル制御
ベクトル制御 (FOC) は、永久磁石同期モーター (PMSM) と誘導モーターの両方において高性能なダイナミクスの実現を支援します。FOC の基本原理は、固定子電流ベクトルを 2 つの直交成分に分離することにあり、1 つは磁束用、もう 1 つはトルク生成用です。この分離は、Clarke 変換および Park 変換と呼ばれる数学的抽象によって実現されます。まず、Clarke 変換により、三相の固定電流信号を二相の固定 α-β 座標系に変換します。次に、Park 変換により、これらの固定ベクトルを回転子の磁場に整合して回転する同期 d-q 座標系へ回転させます。複雑な AC 波形を DC に類似した量へ変換することで、FOC はトルクと磁束を独立かつ高精度に制御できます。
Motor Control Blockset を使用して作成する Simulink モデルは、電力インバーター、モーターの数学的表現、および入れ子形式の比例-積分 (PI) 制御ループで構成される FOC アルゴリズムを統合するために使用できます。機械ブロックのパラメーターと各モーター タイプに必要な磁束推定ロジックを調整することで、PMSM と誘導モーターの両方について FOC をシミュレートできます。
Motor Control Blockset は、モーターの磁束とトルクを直接制御することでモーター速度制御を実装するベクトル モーター制御手法である直接トルク制御 (DTC) をサポートします。"d" 軸と "q" 軸のモーター電流を制御するベクトル制御 (FOC) とは異なり、DTC アルゴリズムではモーターの位置と電流からトルクと磁束の値を推定します。その後、PI コントローラーを使用してモーターのトルクと磁束を制御することで、モーターを駆動する最適電圧を最終的に生成します。
メモ
ここでは、MISRA C™ ガイドラインに準拠したブロックを紹介しています。
関数
mcb.PMSMCharacteristics | Compute and plot PMSM drive characteristics and constraint curves (R2022b 以降) |
mcb.ACIMCharacteristics | Compute and plot ACIM characteristic curves (R2022a 以降) |
mcb.getPIControllerParameters | Compute gains for PI controller in field-oriented control |
mcb.calcFOCGains | Compute gains and transfer functions for PI controller in field-oriented control of PMSM (R2025a 以降) |
mcb.getMotorControlAnalysis | Frequency-domain analysis plots for PI controller of field-oriented control |
ブロック
トピック
- ベクトル制御
ベクトル制御を使用して PMSM と誘導モーターの速度制御を実装する。
- ベクトル制御アルゴリズムの設計
トルク制御サブシステムと速度制御サブシステムを設計し、統合する。
- ステップ 1: Design Current and Position Scaling Subsystems
- ステップ 2: Design Current Controller Subsystem
- ステップ 3: Perform Manual Gain-Tuning of Current Controller
- ステップ 4: 速度制御アルゴリズムの設計
- ステップ 5: 速度コントローラーの手動によるゲイン調整の実行
- Field-Weakening Control
Implement control for speeds above base speed for PMSM and induction motor by using field-weakening control.
- PIL テストを使用したコードの検証とプロファイリング
この例では、Texas Instruments® LAUNCHXL-F28379D ハードウェア ボードでの PIL プロファイリングについて説明します。
- How to Use Single Shunt FOC Library Blocks
This example shows how to use the Simulink blocks for single shunt FOC available with Motor Control Blockset™.
- 直接トルク制御 (DTC)
モーターの磁束とトルクを制御して PMSM の速度制御を実装する。
注目の例

SI 単位を使用した PMSM のベクトル制御
この例では、三相永久磁石同期モーター (PMSM) の角速度を制御するためのベクトル制御 (FOC) 手法を実装します。ただし、この例の FOC アルゴリズムでは、pu 表現の数量の代わりに (pu 単位系の詳細についてはPer-Unit Systemを参照)、SI 単位の信号を使用して計算を実行します。それらの信号とその SI 単位は次のとおりです。
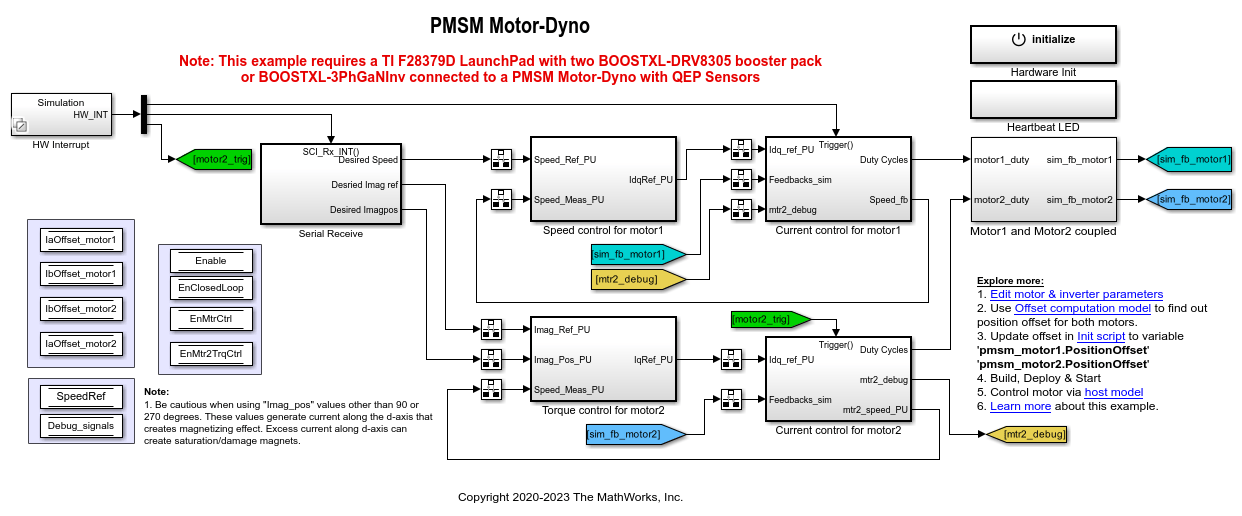
Control PMSM Loaded with Dual Motor (Dyno)
Uses field-oriented control (FOC) to control two three-phase permanent magnet synchronous motors (PMSM) coupled in a dyno setup. Motor 1 runs in the closed-loop speed control mode. Motor 2 runs in the torque control mode and loads Motor 1 because they are mechanically coupled. You can use this example to test a motor in different load conditions.

Simscape Electrical を使用したインバーターのスイッチング ダイナミクスのモデル化
この例では、ベクトル制御 (FOC) を使用して三相永久磁石同期モーター (PMSM) の角速度を制御します。Motor Control Blockset™ の Average Value Inverter ブロックの代わりに次の Simscape™ Electrical™ ブロックを使用するオプションが用意されています。

速度センサーを使用した誘導モーターのベクトル制御
この例では、三相交流誘導モーター (ACIM) の角速度を制御するためのベクトル制御 (FOC) 手法を実装します。この FOC アルゴリズムには回転子の速度フィードバックが必要であり、この例ではそれを直交エンコーダー センサーを使用して取得します。FOC の詳細については、ベクトル制御を参照してください。

Field-Oriented Control (FOC) of PMSM Using Hardware-in-the-Loop (HIL) Simulation
Uses hardware-in-the-loop (HIL) simulation to implement the field-oriented control (FOC) algorithm to control the speed of a three-phase permanent magnet synchronous motor (PMSM). The FOC algorithm requires rotor position feedback, which is obtained by a quadrature encoder sensor. For more information on FOC, see ベクトル制御.
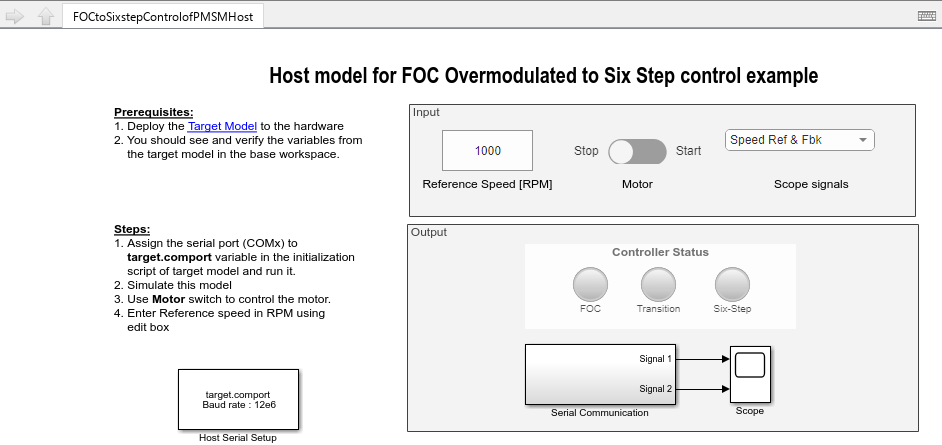
Field-oriented Control of PMSM with Six-Step Transition
Implement dynamic overmodulation to control a surface-mount permanent magnet synchronous motor (SPMSM) using field-oriented control (FOC). When the motor needs to reach higher speeds or produce more torque, the control method seamlessly transitions to six-step control. This allows the motor application to achieve better range without increasing the DC bus voltage of the inverter.
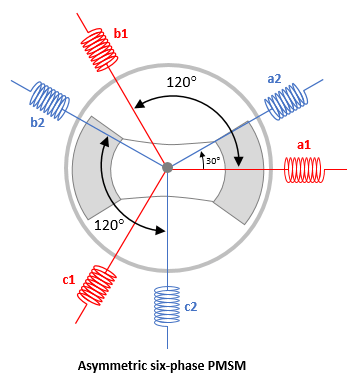
Field-Oriented Control of Six-Phase PMSM
Control the torque of an asymmetric six-phase permanent magnet synchronous motor (PMSM) using field-oriented control (FOC).
Control PMSM Loaded with Dual Motor (Dyno)
Uses field-oriented control (FOC) to control two three-phase permanent magnet synchronous motors (PMSM) coupled in a dyno setup. Motor 1 runs in the closed-loop speed control mode. Motor 2 runs in the torque control mode and loads Motor 1 because they are mechanically coupled. You can use this example to test a motor in different load conditions.

FOC of PMSM Using FPGA-Based Motor Control Development Kit
Use a Field-Oriented Control (FOC) algorithm for a Permanent Magnet Synchronous Motor (PMSM) by using blocks from the Motor Control Blockset™ on an FPGA device (Trenz Electronic™ Motor Control Development Kit TE0820).

PMSM の弱め界磁制御 (MTPA を使用)
この例では、三相永久磁石同期モーター (PMSM) のトルクと角速度を制御するためのベクトル制御 (FOC) 手法を実装します。この FOC アルゴリズムには回転子の位置フィードバックが必要であり、それを直交エンコーダー センサーで取得します。FOC の詳細については、ベクトル制御を参照してください。

Direct Torque Control of PMSM Using Quadrature Encoder or Sensorless Flux Observer
Implements direct torque control (DTC) technique to control the speed of a three-phase permanent magnet synchronous motor (PMSM). Direct Torque Control (DTC) is a vector motor control technique that implements motor speed control by directly controlling the flux and torque of the motor. The example algorithm needs motor currents and position feedback from PMSM. It uses space vector pulse-width modulation (DTC-SVPWM) variant of DTC, which uses space vector modulation (SVM) to produce the pulse-width modulation (PWM) duty cycles that are used by the inverter. For more details about the DTC-SVPWM algorithm used in this example, see 直接トルク制御 (DTC).