Inverse Clarke Transform
αβ から abc への変換の実装
ライブラリ:
Motor Control Blockset /
Controls /
Math Transforms
Motor Control Blockset HDL Support /
Controls /
Math Transforms
説明
Inverse Clarke Transform ブロックは、静止 αβ 基準座標系における平衡二相直交成分の逆 Clarke 変換を計算し、静止 abc 基準座標系における平衡三相成分を出力します。あるいは、このブロックは、成分 α、β、および 0 の逆 Clarke 変換を計算して、三相成分 a、b、および c を出力することもできます。平衡システムの場合、ゼロ成分はゼロに等しくなります。[入力数] パラメーターを使用して 2 つまたは 3 つの入力を使用します。
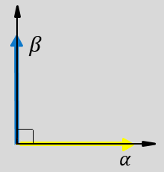
このブロックは、α-β 軸成分を入力として受け入れ、対応する三相信号を出力します。a 相の軸は α 軸と一致します。
αβ 基準座標系における入力成分 α および β。
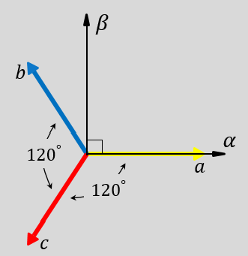
abc 基準座標系と αβ 基準座標系における同等の出力成分 a、b、および c の方向。
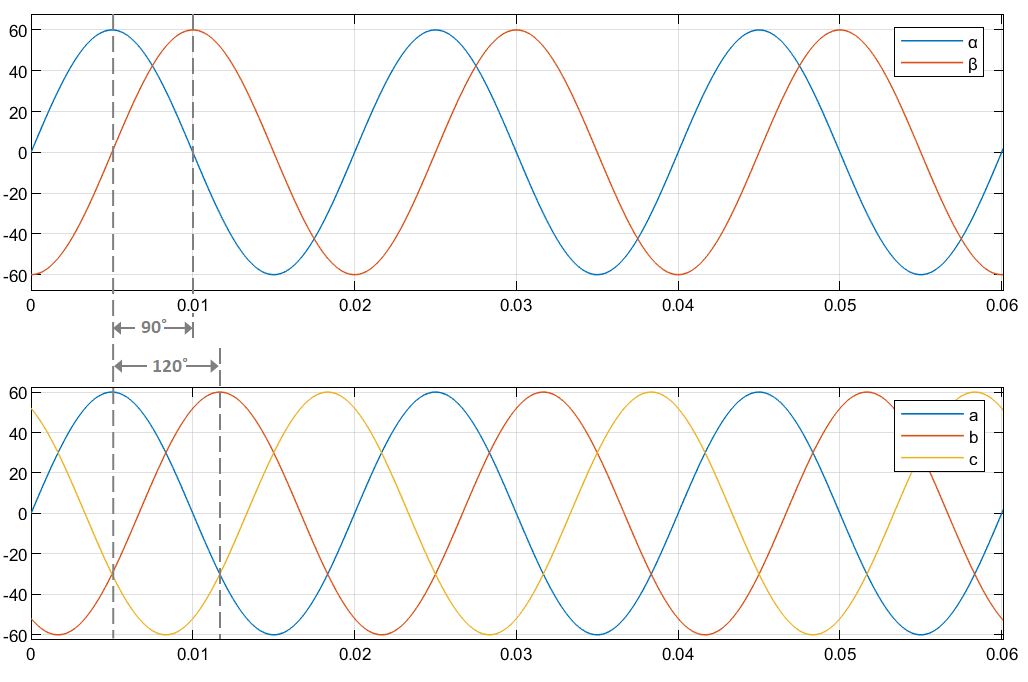
同等の平衡な αβ システムと abc システムの各成分の時間応答。
方程式
逆 Clarke 変換の計算は次の方程式で記述されます。
モーターのような平衡システムの場合、零相成分の計算は常にゼロになります。
したがって、三相モーター ドライブで使用できる電流センサーは 2 つだけです。ここで、3 番目の相は次のように計算できます。
これらの方程式を使用して、このブロックは逆 Clarke 変換を次のように実装します。
ここで、
と は、静止 αβ 基準座標系における平衡二相直交成分です。
は、静止 αβ 基準座標系におけるゼロ成分です。
、、 は、abc 基準座標系における平衡三相成分です。
端子
入力
出力
パラメーター
拡張機能
バージョン履歴
R2020a で導入