SI 単位を使用した PMSM のベクトル制御
この例では、三相永久磁石同期モーター (PMSM) の角速度を制御するためのベクトル制御 (FOC) 手法を実装します。ただし、この例の FOC アルゴリズムでは、pu 表現の数量の代わりに (pu 単位系の詳細についてはPer-Unit Systemを参照)、SI 単位の信号を使用して計算を実行します。それらの信号とその SI 単位は次のとおりです。
回転子速度 - ラジアン/秒
回転子位置 - ラジアン
電流 - アンペア
電圧 - ボルト
ベクトル制御 (FOC) には、回転子位置のリアルタイムのフィードバックが必要になります。この例では、直交エンコーダー センサーを使用して回転子の位置を測定します。FOC の詳細については、ベクトル制御を参照してください。
モデル
この例にはモデル mcb_pmsm_foc_qep_f28379d_SIUnit が含まれています。
このモデルはシミュレーションとコード生成の両方に使用できます。

必要な MathWorks 製品
モデルをシミュレートする場合:
Motor Control Blockset™
コードを生成してモデルを展開する場合:
Motor Control Blockset™
Embedded Coder®
C2000™ Microcontroller Blockset
Fixed-Point Designer™ (コード生成を最適化する場合のみ必要)
前提条件
1. モーター パラメーターを取得します。Simulink® モデルには既定のモーター パラメーターが設定されており、それらをモーターのデータシートまたは他のソースから得られる値に置き換えることができます。
ただし、モーター制御ハードウェアがある場合は、使用するモーターのパラメーターを Motor Control Blockset のパラメーター推定ツールを使用して推定できます。手順については、Motor Control Blockset のパラメーター推定ツールを使用したモーター パラメーターの推定を参照してください。
パラメーター推定ツールは、推定されたモーター パラメーターで "motorParam" 変数 (MATLAB® ワークスペース内) を更新します。
2. モーター パラメーターをデータシートまたは他のソースから取得する場合は、Simulink® モデルに関連付けられたモデル初期化スクリプトでモーターのパラメーターとインバーターのパラメーターを更新します。手順については、Estimate Control Gains and Tune Control Parametersを参照してください。
パラメーター推定ツールを使用する場合は、インバーターのパラメーターは更新してかまいませんが、モーターのパラメーターはモデル初期化スクリプトで更新しないでください。モーターのパラメーターは、更新された "motorParam" ワークスペース変数からスクリプトで自動的に抽出されます。
モデルのシミュレーション
この例はシミュレーションをサポートしています。次の手順に従ってモデルをシミュレートします。
1. この例に含まれているモデルを開きます。
2. [シミュレーション] タブの [実行] をクリックして、モデルをシミュレートします。
3. [シミュレーション] タブの [データ インスペクター] をクリックし、シミュレーション結果を表示して解析します。
コードの生成とターゲット ハードウェアへのモデルの展開
このセクションでは、コードを生成し、ターゲット ハードウェアで FOC アルゴリズムを実行する手順を示します。
この例ではホストとターゲット モデルを使用します。ホスト モデルはコントローラー ハードウェア ボードへのユーザー インターフェイスです。ホスト モデルはホスト コンピューターで実行できます。ホスト モデルを使用するための前提条件として、コントローラー ハードウェア ボードにターゲット モデルを展開します。ホスト モデルは、シリアル通信を使用してターゲット モデルに指令を送り、閉ループ制御でモーターを駆動します。
必要なハードウェア
この例では、次のハードウェア構成をサポートしています。ターゲット モデルの名前を使用して、MATLAB® コマンド プロンプトから対応するハードウェア構成のモデルを開くこともできます。
LAUNCHXL-F28379D コントローラー + BOOSTXL-DRV8305 インバーター:
mcb_pmsm_foc_qep_f28379d_SIUnit
上記のハードウェア構成に関連する接続については、LAUNCHXL-F28069M and LAUNCHXL-F28379D Configurationsを参照してください。
コードの生成とターゲット ハードウェアでのモデルの実行
1. ターゲット モデルをシミュレートし、シミュレーション結果を確認します。
2. ハードウェアの接続を完了します。
3. ADC (または電流) のオフセット値がモデルで自動的に計算されます。この機能を無効にするには (既定では有効)、モデル初期化スクリプトで変数 inverter.ADCOffsetCalibEnable の値を 0 に更新します。
あるいは、ADC のオフセット値を計算し、モデル初期化スクリプトで値を手動で更新できます。手順については、開ループ制御での三相 AC モーターの駆動と ADC オフセットのキャリブレーションを参照してください。
4. 直交エンコーダーのインデックスのオフセット値を計算し、ターゲット モデルに関連付けられているモデル初期化スクリプトで値を更新します。手順については、Quadrature Encoder Offset Calibration for PMSMを参照してください。
5. ターゲット モデルを開きます。モデルの既定のハードウェア構成設定を変更する場合は、モデル コンフィギュレーション パラメーターを参照してください。
6. LAUNCHXL-F28379D の CPU2 にサンプル プログラムを読み込み、CPU2 が CPU1 用のボード周辺装置を使用するように誤って構成されていないことを確認します。たとえば、CPU2 の青色 LED を GPIO31 を使用して作動するプログラム (c28379D_cpu2_blink.slx) を読み込みます。サンプル プログラムまたはモデルの詳細については、Texas Instruments C2000 Microcontroller Blockset 入門 (C2000 Microcontroller Blockset)の「Task 2 - Create, Configure and Run the Model for TI Delfino F28379D LaunchPad (Dual Core)」セクションを参照してください。
7. [ハードウェア] タブの [ビルド、展開、起動] をクリックして、ハードウェアにターゲット モデルを展開します。
8. ターゲット モデルで mcb_pmsm_SIUnit_host_model.slx ホスト モデルのハイパーリンクをクリックして、関連付けられているホスト モデルを開きます。
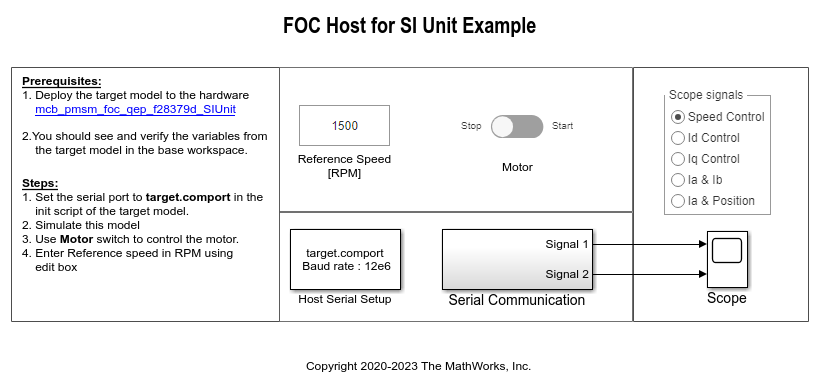
ホストとターゲット モデルの間のシリアル通信の詳細については、Host-Target Communicationを参照してください。
9. ターゲット モデルに関連付けられているモデル初期化スクリプトで、変数 "target.comport" を使用して通信ポートを指定します。この例では、この変数を使用して、ホスト モデルで使用可能な Host Serial Setup、Host Serial Receive、および Host Serial Transmit の各ブロックの [Port] パラメーターを更新します。
10. ホスト モデルで指令速度の値を更新します。
11. [シミュレーション] タブの [実行] をクリックして、ホスト モデルを実行します。
12. モーターの始動と停止のスイッチをオンの位置に切り替えて、モーターの運転を開始します。
13. ホスト モデルの時間スコープで RX サブシステムからのデバッグ信号を観測します。