atan2
4 象限逆正接の計算
ライブラリ:
Motor Control Blockset /
Controls /
Math Transforms
Motor Control Blockset HDL Support /
Controls /
Math Transforms
説明
atan2 ブロックは、2 つの実数に対する 4 象限逆正接を実行します。
方程式
ブロックによる 4 象限逆正接 (θ) の計算方法は次の方程式で記述されます。
ここで、
端子
入力
出力
逆正接で表される角度。これは、指定された点 (x,y) への原点からのベクトルと正の x 軸で形成される角度です。
データ型: single | double | fixed point
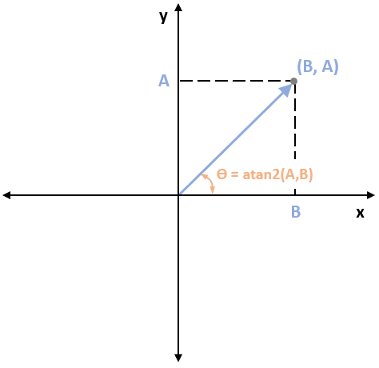
次の図は、x-y 座標平面における入力値 A、B と逆正接の表現を示しています。
パラメーター
拡張機能
バージョン履歴
R2020a で導入