速度制御アルゴリズムの設計
次の手順に従って速度制御アルゴリズムを設計します。
速度コントローラー サブシステムを作成します。先ほど作成した電流コントローラー サブシステムは、速度コントローラー サブシステムの
Iq_ref電流出力を入力として使用します。速度コントローラー サブシステムを作成するには、Simulink® ライブラリ ブラウザーを開き、
Motor Control Blockset/Controls/Controllersライブラリから Discrete PI Controller with anti-windup & reset ブロックを選択します。
MATLAB® 関数
mcb.getPIControllerParameters(モデル初期化スクリプト内) は、d 軸と q 軸の電流コントローラーおよび速度コントローラーの PI コントロール ゲインを計算します。コントローラー ゲインの計算の詳細については、Estimate Control Gains and Tune Control Parametersを参照してください。例については、サンプリング時間 (Ts_speed) として500μs を使用するモデル初期化スクリプト ファイルmcb_pmsm_foc_qep_f28379d_data.m(直交エンコーダーを使用した PMSM のベクトル制御の例で使用) を参照してください。必要に応じて、Enable Data-Store Memory ブロックを使用してコントローラーをリセットできます。速度コントローラーのサブシステムを作成し、サブシステムの入力にサンプル時間が Ts_speed (速度制御ループの実行時間) の Rate Transition ブロック (
Simulink/Signal Attributesライブラリ) を追加します。
速度コントローラー サブシステム (手順 2 で作成) を統合された電流コントローラー サブシステムとプラント モデル サブシステムに統合します。速度コントローラー サブシステムの Iq_ref_PU 出力端子を、Rate Transition ブロックを介して電流コントローラー サブシステムの入力端子に接続します。2 つの端子は異なるサンプル レートで実行されるため、Rate Transition ブロックが必要です。次の図は、速度コントローラー サブシステムと電流コントローラー サブシステムに接続されている Rate Transition ブロックのパラメーター設定例を示しています。

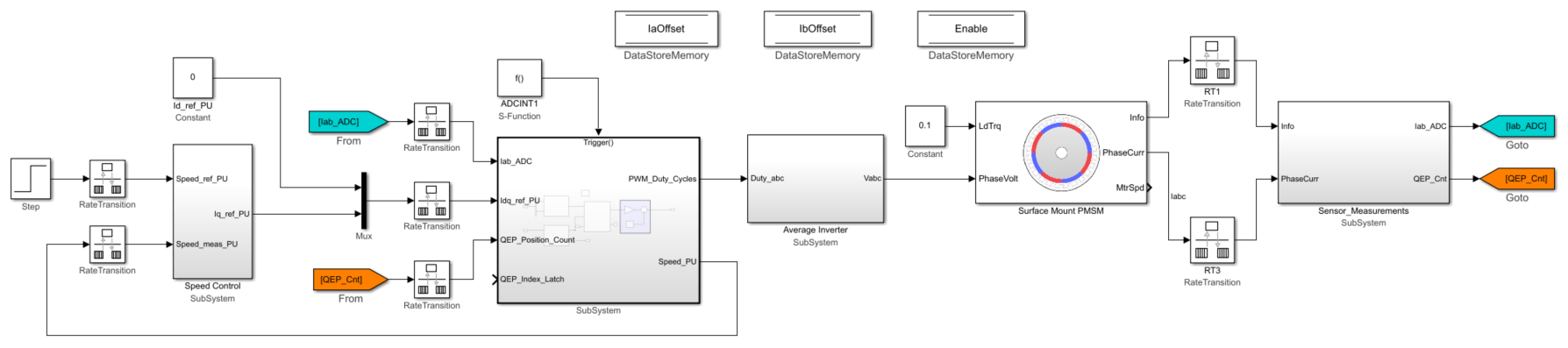
次の図は、統合された速度コントローラー サブシステム、電流コントローラー サブシステム、およびプラント モデル サブシステムを示しています。