worldToImage
(非推奨) イメージへのワールド ポイントの投影
構文
説明
imagePoints = worldToImage(intrinsics,tform,worldPoints)worldPoints をイメージ上の点 imagePoints に投影します。intrinsics は、cameraIntrinsics オブジェクトまたは fisheyeIntrinsics オブジェクトです。tform は rigid3d オブジェクトです。
imagePoints = worldToImage(intrinsics,rotationMatrix,translationVector,worldPoints)
[ は、前述の構文の入力のいずれかを使用し、イメージの境界内にある有効なイメージ ポイントのインデックスも返します。imagePoints,validIndex] = worldToImage(___)
[___] = worldToImage(___'ApplyDistortion', は、歪み適用のオプションを使用した投影を返します。この構文は、非魚眼カメラ パラメーターでサポートされます。distort)
例
一連のキャリブレーション イメージを作成します。
images = imageDatastore(fullfile(toolboxdir("vision"),"visiondata", ... "calibration","slr"));
イメージ内のチェッカーボードのコーナーを検出します。
[imagePoints,patternDims] = detectCheckerboardPoints(images.Files);
左上隅が (0,0) のパターン中心の座標系でチェッカーボードのコーナーのワールド座標を生成します。
squareSize = 29; % in millimeters worldPoints = patternWorldPoints("checkerboard",patternDims,squareSize);
カメラのキャリブレーションを行います。
imageSize = size(readimage(images,1));
cameraParams = estimateCameraParameters(imagePoints,worldPoints, ...
ImageSize=imageSize(1:2));新しい位置でイメージを読み込みます。
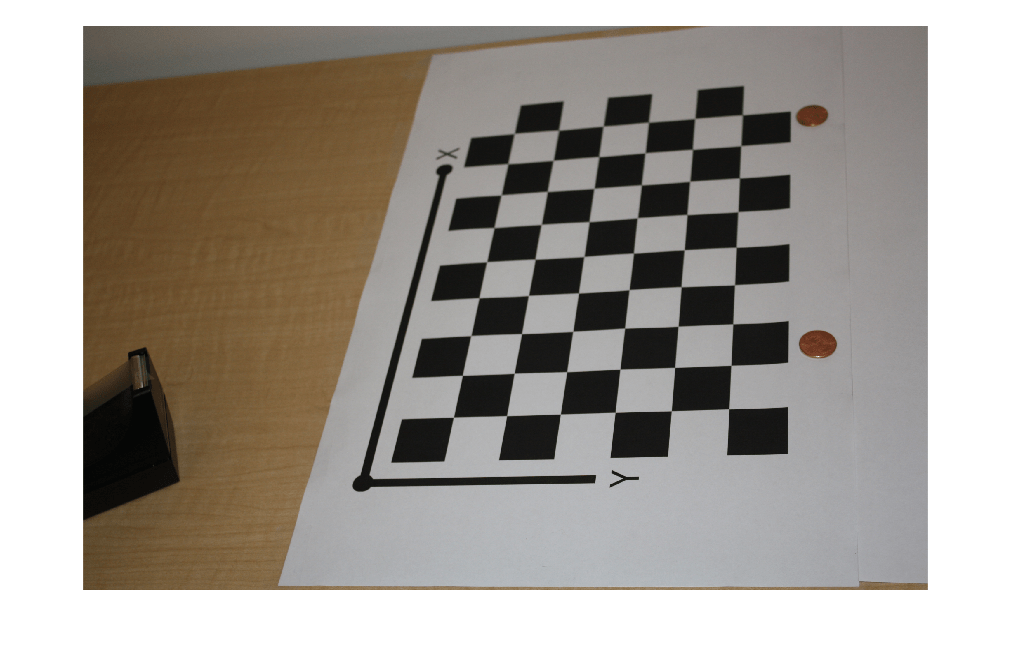
imOrig = imread(fullfile(toolboxdir("vision"),"visiondata", ... "calibration","slr","image9.jpg")); imshow(imOrig);
イメージの歪みを補正します。
imUndistorted = undistortImage(imOrig,cameraParams);
新しいイメージで参照オブジェクトを検索します。
[imagePoints,patternDims] = detectCheckerboardPoints(imUndistorted);
新しい外部パラメーターを計算します。
[R,t] = extrinsics(imagePoints,worldPoints,cameraParams);
ワールド ポイントに z 座標を追加します。
zCoord = zeros(size(worldPoints,1),1); worldPoints = [worldPoints zCoord];
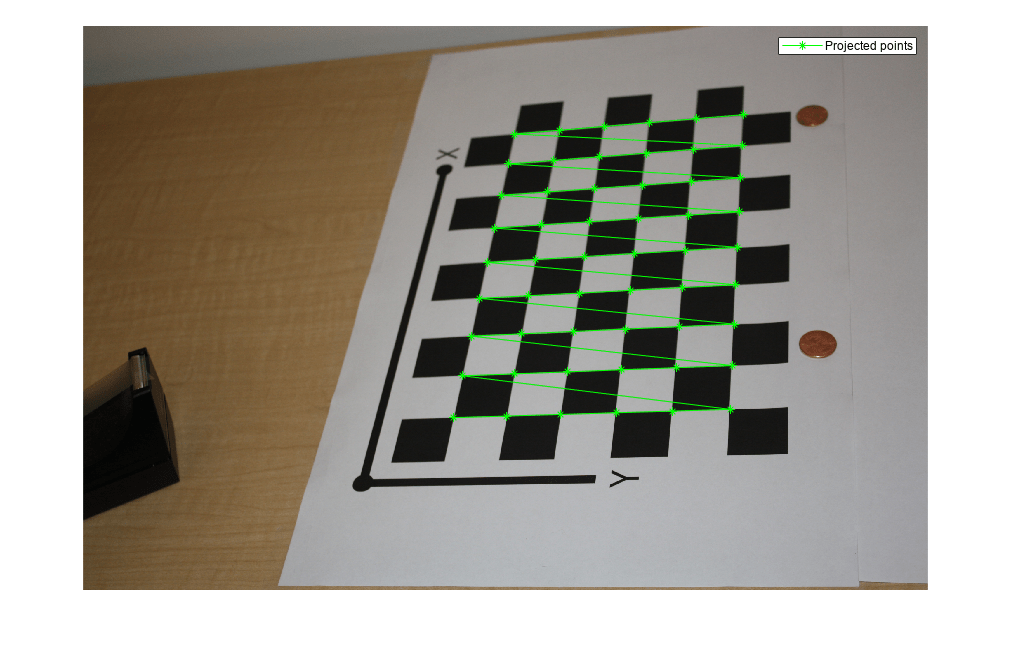
ワールド ポイントを元のイメージに投影します。
projectedPoints = worldToImage(cameraParams,R,t,worldPoints); hold on plot(projectedPoints(:,1),projectedPoints(:,2),"g*-"); legend("Projected points"); hold off
入力引数
ワールド座標内でのカメラの変換。rigid3d オブジェクトとして指定します。
カメラ パラメーター。cameraIntrinsics オブジェクトまたは fisheyeIntrinsics オブジェクトとして指定します。これらのオブジェクトは、カメラの内部キャリブレーション パラメーターに関する情報を格納します (レンズ歪みパラメーターなど)。
イメージ座標に対するワールド座標の 3 次元回転。3 行 3 列として指定します。回転行列を並進ベクトルと共に使用して、ワールド座標系からカメラ座標系に点を変換できます。rotationMatrix と translationVector 入力は同じデータ型でなければなりません。

データ型: double | single
イメージ座標に対するワールド座標の 3 次元並進。1 行 3 列として指定します。並進ベクトルを回転行列と共に使用して、ワールド座標系からカメラ座標系に点を変換できます。rotationMatrix と translationVector 入力は同じデータ型でなければなりません。
データ型: double | single
3 次元ワールド ポイント。3 次元ワールド ポイントの座標 M [x,y,z] を含む M 行 3 列の行列として指定します。
tform 入力引数を使用する場合、worldPoints 座標は tform オブジェクトの Translation プロパティと同じ単位でなければなりません。
レンズ歪みを適用するためのオプション。false または true として指定します。この引数を true に設定すると、関数はレンズ歪みを出力 imagePoints に適用します。
この引数は、cameraParameters オブジェクトを cameraParams 入力として使用する場合にのみ有効です。