ROS ネットワーク接続と調査
ROS に接続してロボティクス アプリケーションを試作し、ROS ネットワーク経由でロボティクス ハードウェアまたはシミュレーターにアクセスします。MATLAB® を使用すると、独自の ROS ネットワークの作成や既存の ROS ネットワークへの接続を行えます。ROS ネットワークを設定するには、まず rosinit を呼び出します。
座標系間の変換に ROS トピックとしてアクセスし、それらを使用して MATLAB でデータを変換できます。詳細については、Access the tf Transformation Tree in ROSを参照してください。
rosrate オブジェクトは、コード実行のタイミングを制御する上で役立ちます。
関数
オブジェクト
ブロック
| Blank Message | 指定されたメッセージ タイプを使用した空白メッセージの作成 |
| Current Time | 現在の ROS 時間またはシステム時間の取得 |
| Set Parameter | Set values on ROS parameter server |
| Coordinate Transformation Conversion | 指定した座標変換表現への変換 |
トピック
- ROS ネットワークの設定
ROS ネットワークの設定と、接続に必要な情報の概要。
- Execute Code Based on ROS Time
Using a
rosrateobject allows you to control the rate of your code execution based on the ROS Time/clocktopic.
注目の例
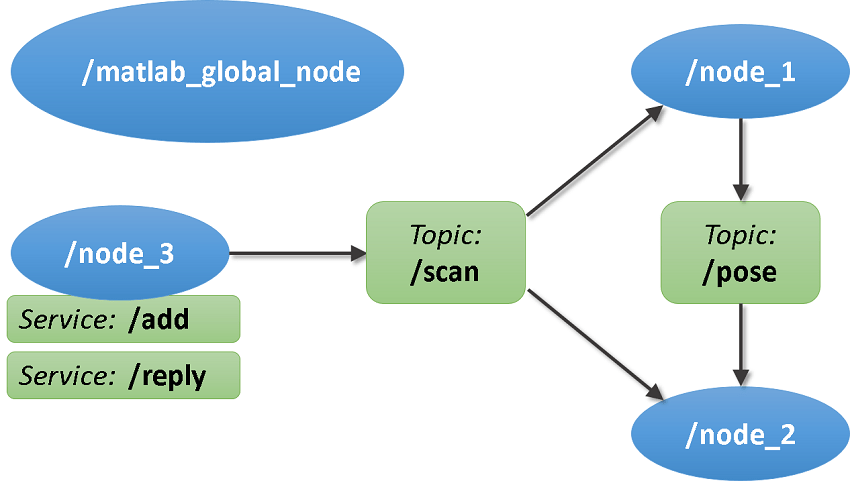
ROS 入門
MATLAB 内で ROS を設定し、ROS ネットワークおよび ROS メッセージに関する情報を取得します。

ROS ネットワークへの接続
MATLAB で ROS マスターを作成し、外部 ROS マスターに接続します。

Access the ROS Parameter Server
Add and retrieve parameters on the ROS parameter server.

Access the tf Transformation Tree in ROS
Access available coordinate frames, retrieve transformations between them, and transform points, vectors, and other entities between any two coordinate frames.
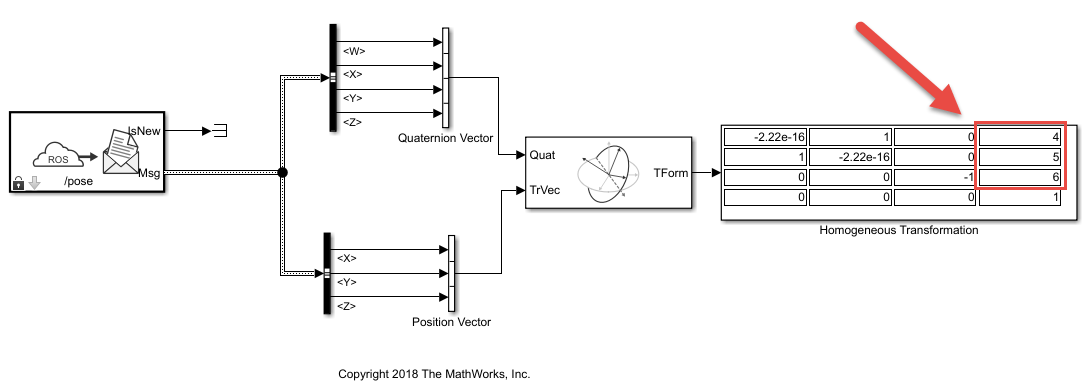
Convert a ROS Pose Message to a Homogeneous Transformation
This model subscribes to a Pose message on the ROS network and
converts it to a homogeneous transformation.
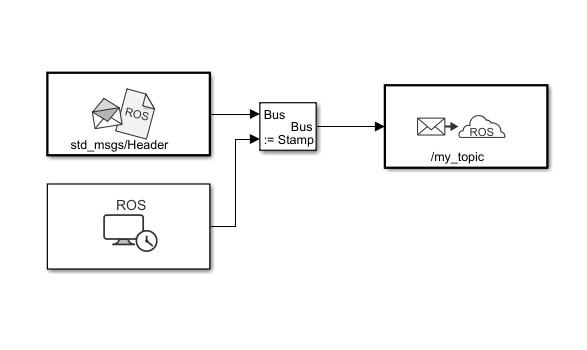
Simulink での現在時間を使用した ROS メッセージのタイム スタンプ設定
コンピューターの現在のシステム時間を使用して ROS メッセージにタイム スタンプを設定します。