Blank Message
指定されたメッセージ タイプを使用した空白メッセージの作成
ライブラリ:
ROS Toolbox /
ROS
説明
Blank Message ブロックは、選択された ROS メッセージ タイプに対応する Simulink® 非バーチャル バスを作成します。ブロックは、Publish ブロック、Subscribe ブロックまたは Call Service ブロックと連携して動作する ROS メッセージ バスを作成します。各サンプル ヒットでは、ブロックは指定のメッセージ タイプに対して空白または "ゼロ" の信号を出力します。バスのすべての要素は 0 に初期化されます。可変長配列の長さも 0 に初期化されます。
例
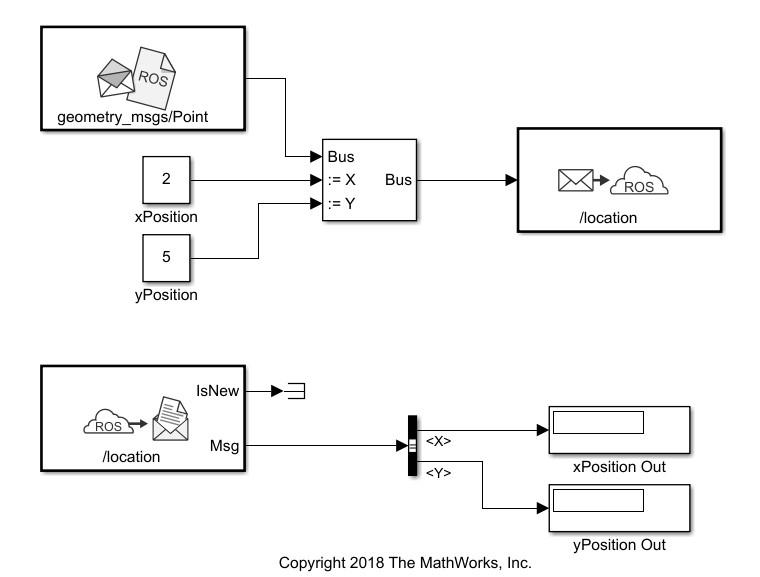
Simulink での ROS メッセージのパブリッシュとサブスクライブ
Simulink を使用して ROS トピックをパブリッシュおよびサブスクライブします。
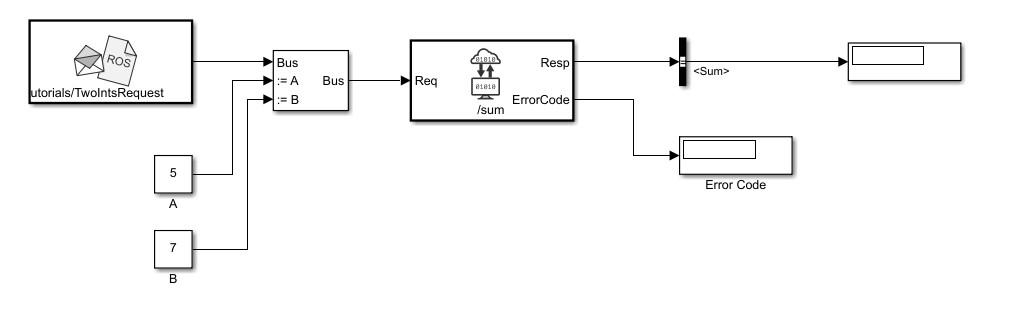
Call ROS Service in Simulink
Use the Call Service block to call a service on the ROS service server.
制限
R2016b より前は、特定の予約されたプロパティ名をもつ ROS メッセージ タイプを使用するモデルは、コードを生成できませんでした。R2016b で、この制限は削除されました。プロパティ名にアンダースコアが追加されるようになりました (例: Vector3Stamped_)。R2016b リリース前に作成されたモデルを使用する場合、アンダースコアをもつ新しい名前を使用して ROS メッセージ タイプを更新します。可変長配列のカスタムの最大サイズを再定義します。
影響を受けるメッセージ タイプは、以下のとおりです。
'geometry_msgs/Vector3Stamped''jsk_pcl_ros/TransformScreenpointResponse''pddl_msgs/PDDLAction''rocon_interaction_msgs/Interaction''capabilities/GetRemappingsResponse''dynamic_reconfigure/Group'
端子
出力
パラメーター
拡張機能
バージョン履歴
R2019b で導入